Релятивистская динамика
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: полная энергия, связь массы и энергии, энергия покоя.
В классической динамике мы начали с законов Ньютона, потом перешли к импульсу, а после него — к энергии. Здесь мы ради простоты изложения поступим ровно наоборот: начнём с энергии, затем перейдём к импульсу и закончим релятивистским уравнением движения — модификацией второго закона Ньютона для теории относительности.
Релятивистская энергия
Предположим, что изолированное тело массы  покоится в данной системе отсчёта. Одно из самых впечатляющих достижений теории относительности — это знаменитая формула Эйнштейна:
покоится в данной системе отсчёта. Одно из самых впечатляющих достижений теории относительности — это знаменитая формула Эйнштейна:
 (1)
(1)
Здесь  — энергия тела,
— энергия тела,  — скорость света в вакууме. Поскольку тело покоится, энергия , вычиляемая по формуле (1), называется энергией покоя.
— скорость света в вакууме. Поскольку тело покоится, энергия , вычиляемая по формуле (1), называется энергией покоя.
Формула (1) утверждает, что каждое тело само по себе обладает энергией — просто потому, что оно существует в природе. Образно говоря, природа затратила определённые усилия на то, чтобы «собрать» данное тело из мельчайших частиц вещества, и мерой этих усилий служит энергия покоя тела. Энергия эта весьма велика; так, в одном килограмме вещества заключена энергия
^{2}=9cdot 10^{16}") Дж.
Дж.
Интересно, какое количество топлива нужно сжечь, чтобы выделилось столько энергии? Возьмём, например, дерево. Его удельная теплота сгорания равна  Дж/кг, поэтому находим:
Дж/кг, поэтому находим:  кг. Это девять миллионов тонн!
кг. Это девять миллионов тонн!
Ещё для сравнения: такую энергию единая энергосистема России вырабатывает примерно за десять дней.
Почему столь грандиозная энергия, содержащаяся в теле, до сих пор оставалась нами незамеченной? Почему в нерелятивистских задачах, связанных с сохранением и превращением энергии, мы не учитывали энергию покоя? Скоро мы ответим на этот вопрос.
Поскольку энергия покоя тела прямо пропорциональна его массе, изменение энергии покоя на величину  приводит к изменению массы тела на
приводит к изменению массы тела на
 .
.
Так, при нагревании тела возрастает его внутренняя энергия, и, стало быть, масса тела увеличивается! В повседневной жизни мы не замечаем этого эффекта ввиду его чрезвычайной малости. Например, для нагревания воды массой  кг на
кг на  (удельная теплоёмкость воды равна
(удельная теплоёмкость воды равна ") ) ей нужно передать количество теплоты:
) ей нужно передать количество теплоты:
 Дж.
Дж.
Увеличение массы воды будет равно:
 кг.
кг.
Столь ничтожное изменение массы невозможно заметить на фоне погрешностей измерительных приборов.
Формула ( 1) даёт энергию покоящегося тела. Что изменится, если тело движется?
Снова рассмотрим неподвижную систему отсчёта  и систему
и систему  , движущуюся относительно со скоростью
, движущуюся относительно со скоростью  . Пусть тело массы покоится в системе ; тогда энергия тела в системе есть энергия покоя, вычисляемая по формуле ( 1). Оказывается, при переходе в систему энергия преобразуется так же, как и время — а именно, энергия тела в системе , в которой тело движется со скоростью
. Пусть тело массы покоится в системе ; тогда энергия тела в системе есть энергия покоя, вычисляемая по формуле ( 1). Оказывается, при переходе в систему энергия преобразуется так же, как и время — а именно, энергия тела в системе , в которой тело движется со скоростью  , равна:
, равна:
 ( 2)
( 2)
Формула ( 2) была также установлена Эйнштейном. Величина — это полная энергия движущегося тела. Поскольку в данной формуле  делится на «релятивистский корень», меньший единицы, полная энергия движущегося тела превышает энергию покоя. Полная энергия будет равна энергии покоя только при
делится на «релятивистский корень», меньший единицы, полная энергия движущегося тела превышает энергию покоя. Полная энергия будет равна энергии покоя только при  .
.
Выражение для полной энергии ( 2) позволяет сделать важные выводы о возможных скоростях движения объектов в природе.
1. Каждое массивное тело обладает определённой энергией, поэтому необходимо выполнение неравенства
 .
.
Оно означает, что  : скорость массивного тела всегда меньше скорости света.
: скорость массивного тела всегда меньше скорости света.
2. В природе существуют безмассовые частицы (например, фотоны), несущие энергию. При подстановке  в формулу ( 2) её числитель обращается в нуль. Но энергия-то фотона ненулевая!
в формулу ( 2) её числитель обращается в нуль. Но энергия-то фотона ненулевая!
Единственный способ избежать здесь противоречия — это принять, что безмассовая частица обязана двигаться со скоростью света. Тогда и знаменатель нашей формулы обратится в нуль, так что формула ( 2) попросту откажет. Нахождение формул для энергии безмассовых частиц не входит в компетенцию теории относительности. Так, выражение для энергии фотона устанавливается в квантовой физике.
Интуитивно чувствуется, что полная энергия ( 2) состоит из энергии покоя и собственно «энергии движения», т. е. кинетической энергии тела. При малых скоростях движения это показывается явным образом. Используем приближённые формулы, справедливые при  :
:
 ( 3)
( 3)
 ( 4)
( 4)
С помощью этих формул последовательно получаем из ( 2):
= mc^{2}+frac{displaystyle mupsilon ^{displaystyle 2}}{displaystyle 2}") ( 5)
( 5)
Таким образом, при малых скоростях движения полная энергия сводится просто к сумме энергия покоя и кинетической энергии. Это служит мотивировкой для определения понятия кинетической энергии в теории относительности:
 . ( 6)
. ( 6)
При  формула ( 6) переходит в нерелятивистское выражение
формула ( 6) переходит в нерелятивистское выражение  .
.
Теперь мы можем ответить на заданный выше вопрос о том, почему до сих пор не учитывалась энергия покоя в нерелятивистских энергетических соотношениях. Как видно из ( 5), при малых скоростях движения энергия покоя входит в полную энергию в качестве слагаемого. В задачах, например, механики и термодинамики изменения энергии тел составляют максимум несколько миллионов джоулей; эти изменения столь незначительны по сравнению с энергиями покоя рассматриваемых тел, что приводят к микроскопическим изменениям их масс. Поэтому с высокой точностью можно считать, что суммарная масса тел не меняется в ходе механических или тепловых процессов. В результате суммы энергий покоя тел в начале и в конце процесса попросту сокращаются в обеих частях закона сохранения энергии!
Но такое бывает не всегда. В других физических ситуациях изменения энергии тел могут приводить к более заметным изменениям суммарной массы. Мы увидим, например, что в ядерных реакциях отличия масс исходных и конечных продуктов обычно составляют доли процента.Скажем, при распаде ядра урана  суммарная масса продуктов распада примерно на
суммарная масса продуктов распада примерно на  меньше массы исходного ядра. Эта одна тысячная доля массы ядра высвобождается в виде энергии, которая при взрыве атомной бомбы способна уничтожить город.
меньше массы исходного ядра. Эта одна тысячная доля массы ядра высвобождается в виде энергии, которая при взрыве атомной бомбы способна уничтожить город.
При неупругом столкновении часть кинетической энергии тел переходит в их внутренюю энергию. Релятивистский закон сохранения полной энергии учитывает этот факт: суммарная масса тел после столкновения увеличивается!
Рассмотрим в качестве примера два тела массы , летящих навстречу друг другу с одинаковой скоростью  . В результате неупругого столкновения образуется тело массы
. В результате неупругого столкновения образуется тело массы  , скорость которого равна нулю по закону сохранения импульса (об этом законе речь впереди). Согласно закону сохранения энергии получаем:
, скорость которого равна нулю по закону сохранения импульса (об этом законе речь впереди). Согласно закону сохранения энергии получаем:
^{displaystyle 2}}{displaystyle c^{displaystyle 2}}}}+frac{displaystyle mc^{displaystyle 2}}{sqrt{displaystyle 1-frac{(displaystyle 3c/5)^{displaystyle 2}}{displaystyle c^{displaystyle 2}}}}= Mc^{2}") ,
,
^{displaystyle 2}}}= Mc^{2}") ,
,
 ,
,
 .
.
Мы видим, что,  — масса образовавшегося тела превышает сумму масс тел до столкновения. Избыток массы, равный
— масса образовавшегося тела превышает сумму масс тел до столкновения. Избыток массы, равный  , возник за счёт перехода кинетической энергии сталкивающихся тел во внутреннюю энергию.
, возник за счёт перехода кинетической энергии сталкивающихся тел во внутреннюю энергию.
Релятивистский импульс.
Классическое выражение для импульса  не годится в теории относительности — оно, в частности, не согласуется с релятивистским законом сложения скоростей. Давайте убедимся в этом на следующем простом примере.
не годится в теории относительности — оно, в частности, не согласуется с релятивистским законом сложения скоростей. Давайте убедимся в этом на следующем простом примере.
Пусть система движется относительно системы со скоростью  (рис. 1). Два тела массы в системе летят навстречу друг другу с одинаковой скоростью
(рис. 1). Два тела массы в системе летят навстречу друг другу с одинаковой скоростью  . Происходит неупругое столкновение.
. Происходит неупругое столкновение.
 |
| Рис. 1. К закону сохранения импульса |
В системе тела после столкновения останавливаются. Давайте, как и выше, найдём массу образовавшегося тела:
^{displaystyle 2}}{displaystyle c^{displaystyle 2}}}}= frac{displaystyle 2mc^{displaystyle 2}}{sqrt{displaystyle 1-(frac{displaystyle 1}{displaystyle 4})^{displaystyle 2}}}= frac{displaystyle 4mc^{displaystyle 2}}{sqrt{displaystyle 3}}") ,
,
откуда
 .
.
Теперь посмотрим на процесс столкновения с точки зрения системы . До столкновения левое тело имеет скорость:
 .
.
Правое тело имеет скорость:
 .
.
Нерелятивистский импульс нашей системы до столкновения равен:
 .
.
После столкновения получившееся тело массы двигается со скоростью  .
.
Его нерелятивистский импульс равен:
 .
.
Как видим,  , то есть нерелятивистский импульс не сохраняется.
, то есть нерелятивистский импульс не сохраняется.
Оказывается, правильное выражение для импульса в теории относительности получается делением классического выражения на «релятивистский корень»: импульс тела массы , двигающегося со скоростью  , равен:
, равен:
 . 7
. 7
Давайте вернёмся к только что рассмотренному примеру и убедимся, что теперь с законом сохранения импульса всё будет в порядке.
Импульс системы до столкновения:
}{displaystyle sqrt{displaystyle 1-frac{(displaystyle 4c/5)^{displaystyle 2}}{displaystyle c^{displaystyle 2}}}}-0= frac{displaystyle 4mc/5}{displaystyle 3/5}= frac{displaystyle 4mc}{displaystyle 3}") .
.
Импульс после столкновения:
^{displaystyle 2}}{displaystyle c^{displaystyle 2}}}}=( frac{displaystyle 4m/sqrt{displaystyle 3})(displaystyle c/2)}{sqrt{displaystyle 3/2}}= frac{displaystyle 4mc}{displaystyle 3}")
Вот теперь всё правильно:  !
!
Связь энергии и импульса.
Из формул ( 2) и ( 7) можно получить замечательное соотношение между энергией и импульсом в теории относительности. Возводим обе части этих формул в квадрат:
 ,
, 
Преобразуем разность:
}{frac{displaystyle c^{displaystyle 2}-displaystyle upsilon ^{displaystyle 2}}{displaystyle c^{displaystyle 2}}}= m^{2}c^{4}")
Это и есть искомое соотношение:
 . ( 8)
. ( 8)
Данная формула позволяет выявить простую связь между энергией и импульсом фотона. Фотон имеет нулевую массу и движется со скоростью света. Как уже было замечено выше, сами по себе энергия и импульс фотона в СТО найдены быть не могут: при подстановке в формулы ( 2) и ( 7) значений  и
и  мы получим нули в числителе и знаменателе. Но зато с помощью ( 8) легко находим:
мы получим нули в числителе и знаменателе. Но зато с помощью ( 8) легко находим:  , или
, или
 ( 9)
( 9)
В квантовой физике устанавливается выражение для энергии фотона, после чего с помощью формулы ( 9) находится его импульс.
Релятивистское уравнение движения.
Рассмотрим тело массы , движущееся вдоль оси  под действием силы
под действием силы  . Уравнение движения тела в классической механике — это второй закон Ньютона:
. Уравнение движения тела в классической механике — это второй закон Ньютона:  . Если за бесконечно малое время
. Если за бесконечно малое время  приращение скорости тела равно
приращение скорости тела равно  , то
, то  , и уравнение движения запишется в виде:
, и уравнение движения запишется в виде:
 . ( 10)
. ( 10)
Теперь заметим, что = dp") — изменение нерелятивистского импульса тела. В результате получим «импульсную» форму записи второго закона Ньютона — производная импульса тела по времени равна силе, приложенной к телу:
— изменение нерелятивистского импульса тела. В результате получим «импульсную» форму записи второго закона Ньютона — производная импульса тела по времени равна силе, приложенной к телу:
 . ( 11)
. ( 11)
Все эти вещи вам знакомы, но повторить никогда не помешает 
Классическое уравнение движения — второй закон Ньютона — является инвариантным относительно преобразований Галилея, которые в классической механике описывают переход из одной инерциальной системы отсчёта в другую (это означает, напомним, что при указанном переходе второй закон Ньютона сохраняет свой вид). Однако в СТО переход между инерциальными системами отсчёта описывается преобразованиями Лоренца, а относительно них второй закон Ньютона уже не является инвариантным. Следовательно, классическое уравнение движения должно быть заменено релятивистским, которое сохраняет свой вид под действием преобразований Лоренца.
То, что второй закон Ньютона ( 10) не может быть верным в СТО, хорошо видно на следующем простом примере. Допустим, что к телу приложена постоянная сила. Тогда согласно классической механике тело будет двигаться с постоянным ускорением; скорость тела будет линейно возрастать и с течением времени превысит скорость света. Но мы знаем, что на самом
деле это невозможно.
Правильное уравнение движения в теории относительности оказывается совсем не сложным.
Релятивистское уравнение движения имеет вид ( 11), где p — релятивистский импульс:
}{displaystyle dt}= F") . ( 12)
. ( 12)
Производная релятивистского импульса по времени равна силе, приложенной к телу.
В теории относительности уравнение ( 12) приходит на смену второму закону Ньютона.
Давайте выясним, как же в действительности будет двигаться тело массы m под действием постоянной силы . При условии  из формулы ( 12) получаем:
из формулы ( 12) получаем:
 .
.
Остаётся выразить отсюда скорость:
 . ( 13)
. ( 13)
Посмотрим, что даёт эта формула при малых и при больших временах движения.
Пользуемся приближёнными соотношениями при :
 , ( 14)
, ( 14)
 . ( 15)
. ( 15)
Формулы ( 14) и ( 15) отличаются от формул ( 3) и ( 4) только лишь знаком в левых частях. Очень рекомендую вам запомнить все эти четыре приближённых равенства — они часто используются в физике.
Итак, начинаем с малых времён движения. Преобразуем выражение ( 13) следующим образом:
 .
.
При малых  имеем:
имеем:
 .
.
Последовательно пользуясь нашими приближёнными формулами, получим:
}approx frac{displaystyle Ft}{displaystyle m}(1-frac{F^{displaystyle 2}t^{displaystyle 2}}{displaystyle 2m^{displaystyle 2}displaystyle c^{displaystyle 2}})") .
.
Выражение в скобках почти не отличается от единицы, поэтому при малых имеем:
 .
.
Здесь  — ускорение тела. Мы получили результат, хорошо известный нам из классической механики: скорость тела линейно растёт со временем. Это и не удивительно — при малых временах движения скорость тела также невелика, поэтому мы можем пренебречь релятивистскими эффектами и пользоваться обычной механикой Ньютона.
— ускорение тела. Мы получили результат, хорошо известный нам из классической механики: скорость тела линейно растёт со временем. Это и не удивительно — при малых временах движения скорость тела также невелика, поэтому мы можем пренебречь релятивистскими эффектами и пользоваться обычной механикой Ньютона.
Теперь переходим к большим временам. Преобразуем формулу ( 13) по-другому:
 .
.
При больших значениях имеем:
 ,
,
и тогда:
") .
.
Хорошо видно, что при  скорость тела неуклонно приближается к скорости света , но всегда остаётся меньше — как того и требует теория относительности.
скорость тела неуклонно приближается к скорости света , но всегда остаётся меньше — как того и требует теория относительности.
Зависимость скорости тела от времени, даваемая формулой ( 13), графически представлена на рис. 2.
 |
| Рис. 2. Разгон тела под действием постоянной силы |
Начальный участок графика — почти линейный; здесь пока работает классическая механика. Впоследствии сказываются релятивистские поправки, график искривляется, и при больших временах наша кривая асимптотически приближается к прямой  .
.
Благодарим за то, что пользуйтесь нашими публикациями.
Информация на странице «Релятивистская динамика» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать необходимые и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими материалами из разделов нашего сайта.
Публикация обновлена:
08.05.2023
1.17.
ОСНОВЫ РЕЛЯТИВИСТСКОЙ ДИНАМИКИ
Релятивистский
импульс. Уравнение движения частицы в
специальной теории относительности.
Работа и энергия. Полная энергия
тела. Взаимосвязь энергии и массы,
энергии и импульса.
Релятивистская
динамика строится на основе постулатов
Эйнштейна и их следствий — преобразований
Лоренца, которые математически
аккумулируют в себе метрические свойства
пространства и времени.
Релятивистский
импульс частицы
В
релятивистской физике для описания
механического движения вводятся
4-вектора положения частицы
![]() ,
,
перемещения
![]()
и скорости
 .
.
Вводим импульс по аналогии с ньютоновой
механикой — как произведение инвариантной
массы (массы покоя), одинаковой в
инерциальных системах отсчета I
и II,
на 4-скорость. Итак, четырехмерным
импульсом называется величина
![]() .
.
|
|
(17.1) |
Сокращенно
пишем
![]()
![]() ,
,
где пространственная и временная
компоненты 4-импульса имеют вид
|
|
(17.2) |
 .
.Здесь
![]() —
—
так называемый релятивистский
3-импулъс.
Очевидно, 4-импульсу отвечает его
инвариант
|
|
(17.3) |
Масса
покоя —
![]() —
—
инвариант преобразований Лоренца. При
небольших скоростях, когда
![]() ,
,
он переходит в инвариант преобразований
Галилея.
Основное
уравнение релятивистской динамики
В ньютоновой
механике обычная трехмерная 3-сила
определяется как скорость изменения
во времени количества движения,
переносимого на данное тело от окружающих
тел и полей (равенство
![]() Ньютона
Ньютона
является одновременно и определением
силы, и законом движения). Аналогично в
релятивистской механике будем определять
силу как производную от релятивиского
3-импулься
|
|
(17.4) |
Это
равенство обобщает ньютонову трактовку
3-силы. В то же время оно представляет
основной закон движения частицы
(материальной точки) в инерциальной
системе отсчета при любых
возможных
скоростях меньших с. Законы
классической динамики получаются из
законов релятивистской динамики в
предельном случае υ
<<
c.
Энергия
свободной частицы. Связь между массой
и энергией
В ньютоновой
механике работа силы равна приращению
кинетической энергии:
 .
.
В СТО понятие силы обобщено, и работу
релятивистской силы нужно заново
вычислить. Найдем работу релятивистской
силы
![]() на
на
элементарном перемещении
![]() частицы
частицы
 .
.
(17.5)
Здесь
использовано правило дифференцирования
произведения функций; учтено что
![]() и
и
![]() .
.
Объединяя оба слагаемые под одним
дифференциалом, окончательно получаем
|
|
(17.6) |

Найденное
равенство показывает, что работа силы
равна приращению величины
 .
.
Поэтому последнюю следует истолковать
как энергию
движущегося
тела (частицы):
|
|
(17.7) |

Эта
формула, установленная Эйнштейном в
1905 г., в начале прошлого столетия вызывала
сомнение, а позже обеспечила полный
триумф теории относительности. Формула
(17.7)
устанавливает связь между массой (покоя)
и энергией тела при его скорости
![]() .
.
Из формулы
Эйнштейна вытекает важное открытие 20
века: любое тело в состоянии покоя
обладает колоссальной энергией, которая
называется
энергией покоя
и равна
|
|
(17.8) |
Например,
тело массой m0
=
l
кг обладает энергией
![]() Дж,
Дж,
т.е. оно обладает энергией, которую,
например, Днепровская ГЭС вырабатывает
за 8 лет, давая в год 3 млрд. квт.-ч. энергии.
Соотношение
носит универсальный характер, оно
применимо ко всем формам энергии,
т.е.можно утверждать, что с энергией,
какой бы формы она не была, связана масса
и, наоборот, со всякой массой связана
энергия.
Дадим
определение: кинетической
энергией
тела
называется разность
![]() ,
,
откуда
![]() или
или
|
|
(17.9) |
Формула
(17.7)
для энергии определяет сумму двух
энергий: энергии покоя (она относится
в внутренней энергии)
![]() и
и
кинетической
![]() .
.
Связь
между энергией и импульсом частицы
Учитывая
значения временной компоненты 4-импульса
P0
(формула (17.2))
и полной энергии Е (формула (17.7)),
4-импульс
![]() (формула
(формула
(17.1))
можно представить в виде
|
|
(17.10) |
Как
видим, в 4-импульсе объединились энергия
Е и релятивистский 3-импульс
![]() ,
,
что означает глубокую внутреннюю связь
между релятивистской энергией
 и
и
релятивистским импульсом
 .
.
При переходе из одной инерциальной
системы отсчета в другую значение каждой
из четырех компонент 4-импульса
![]() определяется
определяется
по формулам Лоренца через все четыре
компоненты в исходной системе I.
Например, значение энергии в системе
II
определяется не только через энергию
в системе I,
но и через все компоненты импульса
![]() .
.
Полезными
являются также очевидные формулы для
релятивистского импульса
![]() и
и
его модуля в виде:
|
|
(17.11) |

Релятивистские
инварианты. Закон сохранения
энергии-импульса
Определим
величины, сохраняющиеся при переходе
из одной системы отсчета в другую. Их
обычно называются инвариантами. Как
отмечалось, 4-импульсу
![]() соответствует
соответствует
инвариант
![]()
Подставляя
значение
![]() получаем
получаем
|
|
(17.12) |

Это
соотношение между релятивистской
энергией и релятивистским импульсом
выполняется как для частицы» так и
для тела, и даже для сложной системы,
так как при его выводе нигде не
использовалась неделимость объекта. И
общем случае в (17.12)
под Е следует понимать полную энергию
системы, а под
![]() —
—
геометрическую
сумму импульсов всех
частей системы. Равенство (17.12)
можно рассматривать так же как определение
инвариантной массы (массы покоя) любой
физической системы
|
|
(17.13) |
В частном
случае системы отсчета, в которой импульс
равен нулю (![]() ),
),
имеем
|
|
(17.14) |
Следовательно, масса
покоя тела определяет его энергию покоя
(во всех ее видах). В релятивистской
механике, в отличие от классической,
энергия тела всегда положительна.
В другом
частном случае, когда масса покоя равна
нулю,
![]() соотношение
соотношение
(17.12)
дает связь между релятивистским импульсом
и энергией следующего вида
![]()
В частности, для для
фотона с нулевой массой покоя эта формула
преобразуется к виду
![]()
Вернемся
к рассмотрению 4-импульса
![]() .
.
Он объединяет релятивистскую энергию
 с
с
релятивистским импульсом
 а
а
значит представляет собой некоторую
новую (одну единую!) величину, которую
можно определить термином энергия-импульс.
4-вектору энергия-импульс соответствует
инвариант (17.12),
играющий важную роль в атомной и ядерной
физике
В случае
изолированной физической системы эта
величина сохраняется не только при
переходе от системы отсчета I
к системе II,
но также сохраняется ее значение как
до, так и после реакции, происходящей в
физической системе.
5
Соседние файлы в папке физика лекцыи_1
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Импульс тела
Импульсом тела называется величина, равная произведению массы тела на его скорость.
Следует помнить, что речь идет о теле, которое можно представить как материальную точку. Импульс тела ($р$) называют также количеством движения. Понятие количества движения было введено в физику Рене Декартом (1596—1650). Термин «импульс» появился позже (impulsus в переводе с латинского означает «толчок»). Импульс является векторной величиной (как и скорость) и выражается формулой:
$p↖{→}=mυ↖{→}$
Направление вектора импульса всегда совпадает с направлением скорости.
За единицу импульса в СИ принимают импульс тела массой $1$ кг, движущегося со скоростью $1$ м/с, следовательно, единицей импульса является $1$ кг $·$ м/с.
Если на тело (материальную точку) действует постоянная сила в течение промежутка времени $∆t$, то постоянным будет и ускорение:
$a↖{→}={{υ_2}↖{→}-{υ_1}↖{→}}/{∆t}$
где, ${υ_1}↖{→}$ и ${υ_2}↖{→}$ — начальная и конечная скорости тела. Подставив это значение в выражение второго закона Ньютона, получим:
${m({υ_2}↖{→}-{υ_1}↖{→})}/{∆t}=F↖{→}$
Раскрыв скобки и воспользовавшись выражением для импульса тела, имеем:
${p_2}↖{→}-{p_1}↖{→}=F↖{→}∆t$
Здесь ${p_2}↖{→}-{p_1}↖{→}=∆p↖{→}$ — изменение импульса за время $∆t$. Тогда предыдущее уравнение примет вид:
$∆p↖{→}=F↖{→}∆t$
Выражение $∆p↖{→}=F↖{→}∆t$ представляет собой математическую запись второго закона Ньютона.
Произведение силы на время ее действия называют импульсом силы. Поэтому изменение импульса точки равно изменению импульса силы, действующей на нее.
Выражение $∆p↖{→}=F↖{→}∆t$ называется уравнением движения тела. Следует заметить, что одно и то же действие — изменение импульса точки — может быть получено малой силой за большой промежуток времени и большой силой за малый промежуток времени.
Импульс системы тел. Закон изменения импульса
Импульсом (количеством движения) механической системы называется вектор, равный сумме импульсов всех материальных точек этой системы:
${p_{сист}}↖{→}={p_1}↖{→}+{p_2}↖{→}+…$
Законы изменения и сохранения импульса являются следствием второго и третьего законов Ньютона.
Рассмотрим систему, состоящую из двух тел. Силы ($F_{12}$ и $F_{21}$ на рисунке, с которыми тела системы взаимодействуют между собой, называются внутренними.
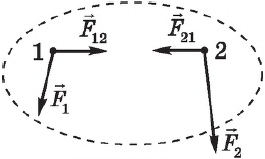
Пусть кроме внутренних сил на систему действуют внешние силы ${F_1}↖{→}$ и ${F_2}↖{→}$. Для каждого тела можно записать уравнение $∆p↖{→}=F↖{→}∆t$. Сложив левые и правые части этих уравнений, получим:
${∆p_1}↖{→}+{∆p_2}↖{→}=({F_{12}}↖{→}+{F_{21}}↖{→}+{F_1}↖{→}+{F_2}↖{→})∆t$
Согласно третьему закону Ньютона ${F_{12}}↖{→}=-{F_{21}}↖{→}$.
Следовательно,
${∆p_1}↖{→}+{∆p_2}↖{→}=({F_1}↖{→}+{F_2}↖{→})∆t$
В левой части стоит геометрическая сумма изменений импульсов всех тел системы, равная изменению импульса самой системы — ${∆p_{сист}}↖{→}$.С учетом этого равенство ${∆p_1}↖{→}+{∆p_2}↖{→}=({F_1}↖{→}+{F_2}↖{→})∆t$ можно записать:
${∆p_{сист}}↖{→}=F↖{→}∆t$
где $F↖{→}$ — сумма всех внешних сил, действующих на тело. Полученный результат означает, что импульс системы могут изменить только внешние силы, причем изменение импульса системы направлено так же, как суммарная внешняя сила. В этом суть закона изменения импульса механической системы.
Внутренние силы изменить суммарный импульс системы не могут. Они лишь меняют импульсы отдельных тел системы.
Закон сохранения импульса
Из уравнения ${∆p_{сист}}↖{→}=F↖{→}∆t$ вытекает закон сохранения импульса. Если на систему не действуют никакие внешние силы, то правая часть уравнения ${∆p_{сист}}↖{→}=F↖{→}∆t$ обращается в ноль, что означает неизменность суммарного импульса системы:
${∆p_{сист}}↖{→}=m_1{υ_1}↖{→}+m_2{υ_2}↖{→}=const$
Система, на которую не действуют никакие внешние силы или равнодействующая внешних сил равна нулю, называется замкнутой.
Закон сохранения импульса гласит:
Суммарный импульс замкнутой системы тел остается постоянным при любых взаимодействиях тел системы между собой.
Полученный результат справедлив для системы, содержащей произвольное число тел. Если сумма внешних сил не равна нулю, но сумма их проекций на какое-то направление равна нулю, то проекция импульса системы на это направление не меняется. Так, например, система тел на поверхности Земли не может считаться замкнутой из-за силы тяжести, действующей на все тела, однако сумма проекций импульсов на горизонтальное направление может оставаться неизменной (при отсутствии трения), т. к. в этом направлении сила тяжести не действует.
Реактивное движение
Рассмотрим примеры, подтверждающие справедливость закона сохранения импульса.
Возьмем детский резиновый шарик, надуем его и отпустим. Мы увидим, что когда воздух начнет выходить из него в одну сторону, сам шарик полетит в другую. Движение шарика является примером реактивного движения. Объясняется оно законом сохранения импульса: суммарный импульс системы «шарик плюс воздух в нем» до истечения воздуха равен нулю; он должен остаться равным нулю и во время движения; поэтому шарик движется в сторону, противоположную направлению истечения струи, и с такой скоростью, что его импульс по модулю равен импульсу воздушной струи.
Реактивным движением называют движение тела, возникающее при отделении от него с какой- либо скоростью некоторой его части. Вследствие закона сохранения импульса направление движения тела при этом противоположно направлению движения отделившейся части.
На принципе реактивного движения основаны полеты ракет. Современная космическая ракета представляет собой очень сложный летательный аппарат. Масса ракеты складывается из массы рабочего тела (т. е. раскаленных газов, образующихся в результате сгорания топлива и выбрасываемых в виде реактивной струи) и конечной, или, как говорят, «сухой» массы ракеты, остающейся после выброса из ракеты рабочего тела.
Когда реактивная газовая струя с большой скоростью выбрасывается из ракеты, сама ракета устремляется в противоположную сторону. Согласно закону сохранения импульса, импульс $m_{p}υ_p$, приобретаемый ракетой, должен быть равен импульсу $m_{газ}·υ_{газ}$ выброшенных газов:
$m_{p}υ_p=m_{газ}·υ_{газ}$
Отсюда следует, что скорость ракеты
$υ_p=({m_{газ}}/{m_p})·υ_{газ}$
Из этой формулы видно, что скорость ракеты тем больше, чем больше скорость выбрасываемых газов и отношение массы рабочего тела (т. е. массы топлива) к конечной («сухой») массе ракеты.
Формула $υ_p=({m_{газ}}/{m_p})·υ_{газ}$ является приближенной. В ней не учитывается, что по мере сгорания топлива масса летящей ракеты становится все меньше и меньше. Точная формула для скорости ракеты была получена в 1897 г. К. Э. Циолковским и носит его имя.
Формула Циолковского позволяет рассчитать запасы топлива, необходимые для сообщения ракете заданной скорости.
Работа силы
Термин «работа» был введен в физику в 1826 г. французским ученым Ж. Понселе. Если в обыденной жизни работой называют лишь труд человека, то в физике и, в частности, в механике принято считать, что работу совершает сила. Физическую величину работы обычно обозначают буквой $А$.
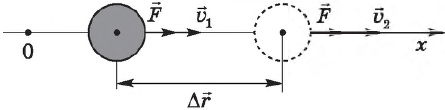
Работа силы — это мера действия силы, зависящая от ее модуля и направления, а также от перемещения точки приложения силы. Для постоянной силы и прямолинейного перемещения работа определяется равенством:
$A=F|∆r↖{→}|cosα$
где $F$ — сила, действующая на тело, $∆r↖{→}$ — перемещение, $α$ — угол между силой и перемещением.
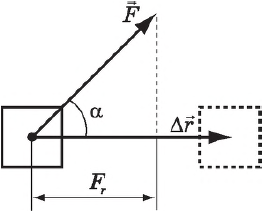
Работа силы равна произведению модулей силы и перемещения и косинуса угла между ними, т. е. скалярному произведению векторов $F↖{→}$ и $∆r↖{→}$.
Работа — величина скалярная. Если $α < 90°$, то $А > 0$, а если $90° < α < 180°$, то $A < 0$; если же $α = 90°$, то $А = 0$. Так, сила тяжести не совершает работу при перемещении тела по горизонтальной плоскости. Также при движении спутника по круговой орбите сила тяготения не совершает работу.
При действии на тело нескольких сил полная работа (сумма работ всех сил) равна работе результирующей силы.
Единицей работы в СИ является джоуль ($1$ Дж). $1$ Дж — это работа, которую совершает сила в $1$ Н на пути в $1$ м в направлении действия этой силы. Эта единица названа в честь английского ученого Дж. Джоуля (1818-1889): $1$ Дж = $1$ Н $·$ м. Часто применяются также килоджоули и миллиджоули: $1$ кДж $= 1 000$ Дж, $1$ мДж $= 0.001$ Дж.
Работа силы тяжести
Рассмотрим тело, скользящее по наклонной плоскости с углом наклона $α$ и высотой $Н$.
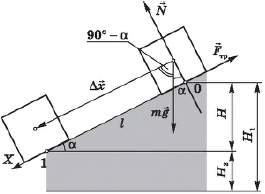
Выразим $∆x$ через $H$ и $α$:
$∆x={H}/{sinα}$
Учитывая, что сила тяжести $F_т=mg$ составляет угол ($90° — α$) с направлением перемещения, используя формулу $∆x={H}/{sin}α$, получим выражение для работы силы тяжести $A_g$:
$A_g=mg·cos(90°-α)·{H}/{sinα}=mgH$
Из этой формулы видно, что работа силы тяжести зависит от высоты и не зависит от угла наклона плоскости.
Отсюда следует, что:
- работа силы тяжести не зависит от формы траектории, по которой движется тело, а лишь от начального и конечного положения тела;
- при перемещении тела по замкнутой траектории работа силы тяжести равна нулю, т. е. сила тяжести — консервативная сила (консервативными называются силы, обладающие таким свойством).
Работа сил реакции, равна нулю, поскольку сила реакции ($N$) направлена перпендикулярно перемещению $∆x$.
Работа силы трения
Сила трения направлена противоположно перемещению $∆x$ и составляет с ним угол $180°$, поэтому работа силы трения отрицательна:
$A_{тр}=F_{тр}∆x·cos180°=-F_{тр}·∆x$
Так как $F_{тр}=μN, N=mg·cosα, ∆x=l={H}/{sinα},$ то
$A_{тр}=μmgHctgα$
Работа силы упругости
Пусть на нерастянутую пружину длиной $l_0$ действует внешняя сила $F↖{→}$, растягивая ее на $∆l_0=x_0$. В положении $x=x_0F_{упр}=kx_0$. После прекращения действия силы $F↖{→}$ в точке $х_0$ пружина под действием силы $F_{упр}$ сжимается.
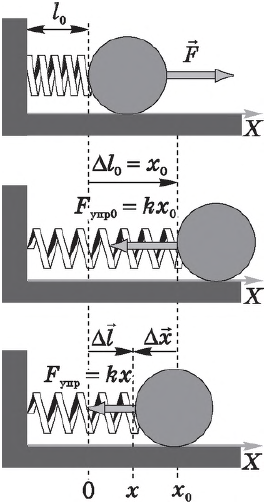
Определим работу силы упругости при изменении координаты правого конца пружины от $х_0$ до $х$. Поскольку сила упругости на этом участке изменяется линейно, в законе Гука можно использовать ее среднее значение на этом участке:
$F_{упр.ср.}={kx_0+kx}/{2}={k}/{2}(x_0+x)$
Тогда работа (с учетом того, что направления ${F_{упр.ср.}}↖{→}$ и ${∆x}↖{→}$ совпадают) равна:
$A_{упр}={k}/{2}(x_0+x)(x_0-x)={kx_0^2}/{2}-{kx^2}/{2}$
Можно показать, что вид последней формулы не зависит от угла между ${F_{упр.ср.}}↖{→}$ и ${∆x}↖{→}$. Работа сил упругости зависит лишь от деформаций пружины в начальном и конечном состояниях.
Таким образом, сила упругости, подобно силе тяжести, является консервативной силой.
Мощность силы
Мощность — физическая величина, измеряемая отношением работы к промежутку времени, в течение которого она произведена.
Другими словами, мощность показывает, какая работа совершается за единицу времени (в СИ — за $1$ с).
Мощность определяется формулой:
$N={A}/{∆t}$
где $N$ — мощность, $А$ — работа, совершенная за время $∆t$.
Подставив в формулу $N={A}/{∆t}$ вместо работы $A$ ее выражение $A=F|{∆r}↖{→}|cosα$, получим:
$N={F|{∆r}↖{→}|cosα}/{∆t}=Fυcosα$
Мощность равна произведению модулей векторов силы и скорости на косинус угла между этими векторами.
Мощность в системе СИ измеряется в ваттах (Вт). Один ватт ($1$ Вт) — это такая мощность, при которой за $1$ с совершается работа $1$ Дж: $1$ Вт $= 1$ Дж/с.
Эта единица названа в часть английского изобретателя Дж. Ватта (Уатта), построившего первую паровую машину. Сам Дж. Ватт (1736-1819) пользовался другой единицей мощности — лошадиной силой (л. с.), которую он ввел для того, чтобы можно было сравнивать работоспособности паровой машины и лошади: $1$ л.с. $= 735.5$ Вт.
В технике часто применяются более крупные единицы мощности — киловатт и мегаватт: $1$ кВт $= 1000$ Вт, $1$ МВт $= 1000000$ Вт.
Кинетическая энергия. Закон изменения кинетической энергии
Если тело или несколько взаимодействующих между собой тел (система тел) могут совершать работу, то говорят, что они обладают энергией.
Слово «энергия» (от греч. energia — действие, деятельность) нередко употребляется в быту. Так, например, людей, которые могут быстро выполнять работу, называют энергичными, обладающими большой энергией.
Энергия, которой обладает тело вследствие движения, называется кинетической энергией.
Как и в случае определения энергии вообще, о кинетической энергии можно сказать, что кинетическая энергия — это способность движущегося тела совершать работу.
Найдем кинетическую энергию тела массой $m$, движущегося со скоростью $υ$. Поскольку кинетическая энергия — это энергия, обусловленная движением, нулевым состоянием для нее является то состояние, в котором тело покоится. Найдя работу, необходимую для сообщения телу данной скорости, мы найдем его кинетическую энергию.
Для этого подсчитаем работу на участке перемещения $∆r↖{→}$ при совпадении направлений векторов силы $F↖{→}$ и перемещения $∆r↖{→}$. В этом случае работа равна
$A=F·∆x,$
где $∆x=∆r$
Для движения точки с ускорением $α=const$ выражение для перемещения имеет вид:
$∆x=υ_1t+{at^2}/{2},$
где $υ_1$ — начальная скорость.
Подставив в уравнение $A=F·∆x$ выражение для $∆x$ из $∆x=υ_1t+{at^2}/{2}$ и воспользовавшись вторым законом Ньютона $F=ma$, получим:
$A=ma(υ_1t+{at^2}/{2})={mat}/{2}(2υ_1+at)$
Выразив ускорение через начальную $υ_1$ и конечную $υ_2$ скорости $a={υ_2-υ_1}/{t}$ и подставив в $A=ma(υ_1t+{at^2}/{2})={mat}/{2}(2υ_1+at)$ имеем:
$A={m(υ_2-υ_1)}/{2}·(2υ_1+υ_2-υ_1)$
или
$A={mυ_2^2}/{2}-{mυ_1^2}/{2}$
Приравняв теперь начальную скорость к нулю: $υ_1=0$, получим выражение для кинетической энергии:
$E_K={mυ}/{2}={p^2}/{2m}$
Таким образом, движущееся тело обладает кинетической энергией. Эта энергия равна работе, которую необходимо совершить, чтобы увеличить скорость тела от нуля до значения $υ$.
Из $E_K={mυ}/{2}={p^2}/{2m}$ следует, что работа силы по перемещению тела из одного положения в другое равна изменению кинетической энергии:
$A=E_{K_2}-E_{K_1}=∆E_K$
Равенство $A=E_{K_2}-E_{K_1}=∆E_K$ выражает теорему об изменении кинетической энергии.
Изменение кинетической энергии тела (материальной точки) за некоторый промежуток времени равно работе, совершенной за это время силой, действующей на тело.
Потенциальная энергия
Потенциальной энергией называется энергия, определяемая взаимным расположением взаимодействующих тел или частей одного и того же тела.
Поскольку энергия определяется как способность тела совершать работу, то потенциальную энергию, естественно, определяют как работу силы, зависящую только от взаимного расположения тел. Таковой является работа силы тяжести $A=mgh_1-mgh_2=mgH$ и работа силы упругости:
$A={kx_0^2}/{2}-{kx^2}/{2}$
Потенциальной энергией тела, взаимодействующего с Землей, называют величину, равную произведению массы $m$ этого тела на ускорение свободного падения $g$ и на высоту $h$ тела над поверхностью Земли:
$E_p=mgh$
Потенциальной энергией упруго деформированного тела называют величину, равную половине произведения коэффициента упругости (жесткости) $k$ тела на квадрат деформации $∆l$:
$E_p={1}/{2}k∆l^2$
Работа консервативных сил (тяжести и упругости) с учетом $E_p=mgh$ и $E_p={1}/{2}k∆l^2$ выражается следующим образом:
$A=E_{p_1}-E_{p_2}=-(E_{p_2}-E_{p_1})=-∆E_p$
Эта формула позволяет дать общее определение потенциальной энергии.
Потенциальной энергией системы называется зависящая от положения тел величина, изменение которой при переходе системы из начального состояния в конечное равно работе внутренних консервативных сил системы, взятой с противоположным знаком.
Знак «минус» в правой части уравнения $A=E_{p_1}-E_{p_2}=-(E_{p_2}-E_{p_1})=-∆E_p$ означает, что при совершении работы внутренними силами (например, падение тела на землю под действием силы тяжести в системе «камень — Земля») энергия системы убывает. Работа и изменение потенциальной энергии в системе всегда имеют противоположные знаки.
Поскольку работа определяет лишь изменение потенциальной энергии, то физический смысл в механике имеет только изменение энергии. Поэтому выбор нулевого уровня энергии произволен и определяется исключительно соображениями удобства, например, простотой записи соответствующих уравнений.
Закон изменения и сохранения механической энергии
Полной механической энергией системы называется сумма ее кинетической и потенциальной энергий:
$E=E_k+E_p$
Она определяется положением тел (потенциальная энергия) и их скоростью (кинетическая энергия).
Согласно теореме о кинетической энергии,
$E_k-E_{k_1}=A_p+A_{пр},$
где $А_р$ — работа потенциальных сил, $А_{пр}$ — работа непотенциальных сил.
В свою очередь, работа потенциальных сил равна разности потенциальной энергии тела в начальном $Е_{р_1}$ и конечном $Е_р$ состояниях. Учитывая это, получим выражение для закона изменения механической энергии:
$(E_k+E_p)-(E_{k_1}+E_{p_1})=A_{пр}$
где левая часть равенства — изменение полной механической энергии, а правая — работа непотенциальных сил.
Итак, закон изменения механической энергии гласит:
Изменение механической энергии системы равно работе всех непотенциальных сил.
Механическая система, в которой действуют только потенциальные силы, называется консервативной.
В консервативной системе $А_{пр} = 0$. Отсюда следует закон сохранения механической энергии:
В замкнутой консервативной системе полная механическая энергия сохраняется (не изменяется со временем):
$E_k+E_p=E_{k_1}+E_{p_1}$
Закон сохранения механической энергии выводится из законов механики Ньютона, которые применимы для системы материальных точек (или макрочастиц).
Однако закон сохранения механической энергии справедлив и для системы микрочастиц, где сами законы Ньютона уже не действуют.
Закон сохранения механической энергии является следствием однородности времени.
Однородность времени состоит в том, что при одинаковых начальных условиях протекание физических процессов не зависит от того, в какой момент времени эти условия созданы.
Закон сохранения полной механической энергии означает, что при изменении кинетической энергии в консервативной системе должна меняться и ее потенциальная энергия, так что их сумма остается постоянной. Это означает возможность превращения одного вида энергии в другой.
В соответствии с различными формами движения материи рассматривают различные виды энергии: механическую, внутреннюю (равную сумме кинетической энергии хаотического движения молекул относительно центра масс тела и потенциальной энергии взаимодействия молекул друг с другом), электромагнитную, химическую (которая складывается из кинетической энергии движения электронов и электрической энергии их взаимодействия друг с другом и с атомными ядрами), ядерную и пр. Из сказанного видно, что деление энергии на разные виды достаточно условно.
Явления природы обычно сопровождаются превращением одного вида энергии в другой. Так, например, трение частей различных механизмов приводит к превращению механической энергии в тепло, т. е. во внутреннюю энергию. В тепловых двигателях, наоборот, происходит превращение внутренней энергии в механическую; в гальванических элементах химическая энергия превращается в электрическую и т. д.
В настоящее время понятие энергии является одним из основных понятий физики. Это понятие неразрывно связано с представлением о превращении одной формы движения в другую.
Вот как в современной физике формулируется понятие энергии:
Энергия — общая количественная мера движения и взаимодействия всех видов материи. Энергия не возникает из ничего и не исчезает, она может только переходить из одной формы в другую. Понятие энергии связывает воедино все явления природы.
Простые механизмы. КПД механизмов
Простыми механизмами называются приспособления, изменяющие величину или направление приложенных к телу сил.
Они применяются для перемещения или подъема больших грузов с помощью небольших усилий. К ним относятся рычаг и его разновидности — блоки (подвижный и неподвижный), ворот, наклонная плоскость и ее разновидности — клин, винт и др.
Рычаг. Правило рычага
Рычаг представляет собой твердое тело, способное вращаться вокруг неподвижной опоры.
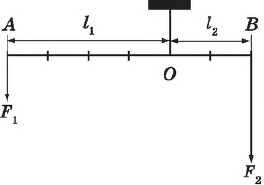
Правило рычага гласит:
Рычаг находится в равновесии, если приложенные к нему силы обратно пропорциональны их плечам:
${F_2}/{F_1}={l_1}/{l_2}$
Из формулы ${F_2}/{F_1}={l_1}/{l_2}$, применив к ней свойство пропорции (произведение крайних членов пропорции равно произведению ее средних членов), можно получить такую формулу:
$F_1l_1=F_2l_2$
Но $F_1l_1=M_1$ — момент силы, стремящейся повернуть рычаг по часовой стрелке, а $F_2l_2=M_2$ — момент силы, стремящейся повернуть рычаг против часовой стрелки. Таким образом, $M_1=M_2$, что и требовалось доказать.
Рычаг начал применяться людьми в глубокой древности. С его помощью удавалось поднимать тяжелые каменные плиты при постройке пирамид в Древнем Египте. Без рычага это было бы невозможно. Ведь, например, для возведения пирамиды Хеопса, имеющей высоту $147$ м, было использовано более двух миллионов каменных глыб, самая меньшая из которых имела массу $2.5$ тонн!
В наше время рычаги находят широкое применение как на производстве (например, подъемные краны), так и в быту (ножницы, кусачки, весы).
Неподвижный блок

Действие неподвижного блока аналогично действию рычага с равными плечами: $l_1=l_2=r$. Приложенная сила $F_1$ равна нагрузке $F_2$, и условие равновесия имеет вид:
$F_1=F_2$
Неподвижный блок применяют, когда нужно изменить направление силы, не меняя ее величину.
Подвижный блок

Подвижный блок действует аналогично рычагу, плечи которого составляют: $l_2={l_1}/{2}=r$. При этом условие равновесия имеет вид:
$F_1={F_2}/{2}$
где $F_1$ — приложенная сила, $F_2$ — нагрузка. Применение подвижного блока дает выигрыш в силе в два раза.
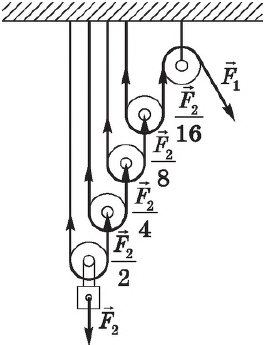
Полиспаст (система блоков)
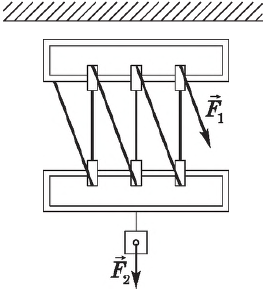
Обычный полиспаст состоит из $n$ подвижных и $n$ неподвижных блоков. Его применив дает выигрыш в силе в $2n$ раз:
$F_1={F_2}/{2n}$
Степенной полиспаст состоит из п подвижных и одного неподвижного блока. Применение степенного полиспаста дает выигрыш в силе в $2^n$ раз:
$F_1={F_2}/{2^n}$
Винт
Винт представляет собой наклонную плоскость, навитую на ось.
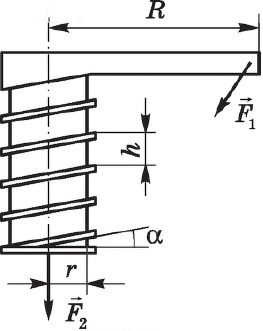
Условие равновесия сил, действующих на винт, имеет вид:
$F_1={F_2h}/{2πr}=F_2tgα, F_1={F_2h}/{2πR}$
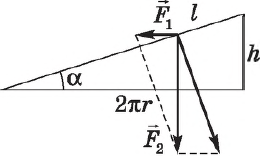
где $F_1$ — внешняя сила, приложенная к винту и действующая на расстоянии $R$ от его оси; $F_2$ — сила, действующая в направлении оси винта; $h$ — шаг винта; $r$ — средний радиус резьбы; $α$ — угол наклона резьбы. $R$ — длина рычага (гаечного ключа), вращающего винт с силой $F_1$.
Коэффициент полезного действия
Коэффициент полезного действия (КПД) — отношение полезной работы ко всей затраченной работе.
Коэффициент полезного действия часто выражают в процентах и обозначают греческой буквой $η$ («эта»):
$η={A_п}/{A_3}·100%$
где $А_п$ — полезная работа, $А_3$ — вся затраченная работа.
Полезная работа всегда составляет лишь часть полной работы, которую затрачивает человек, используя тот или иной механизм.
Часть совершенной работы тратится на преодоление сил трения. Поскольку $А_3 > А_п$, КПД всегда меньше $1$ (или $< 100%$).
Когда КПД немного меньше $1$, можно считать, что затраченная работа примерно равна полезной: $А_3 ≈ А_п$.
Поскольку каждую из работ в этом равенстве можно выразить в виде произведения соответствующей силы на пройденный путь, то его можно переписать так: $F_1s_1≈F_2s_2$.
Отсюда следует, что, выигрывая с помощью механизма в силе, мы во столько же раз проигрываем в пути, и наоборот. Этот закон называют золотым правилом механики.
Золотое правило механики является приближенным законом, так как в нем не учитывается работа по преодолению трения и силы тяжести частей используемых приспособлений. Тем не менее оно бывает очень полезным при анализе работы любого простого механизма.
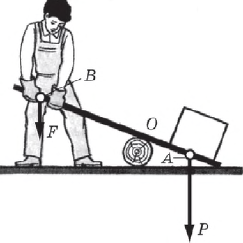
Так, например, благодаря этому правилу сразу можно сказать, что рабочему, изображенному на рисунке, при двукратном выигрыше в силе подъема груза на $10$ см придется опустить противоположный конец рычага на $20$ см.
Столкновение тел. Упругий и неупругий удары
Законы сохранения импульса и механической энергии применяются для решения задачи о движении тел после столкновения: по известным импульсам и энергиям до столкновения определяются значения этих величин после столкновения. Рассмотрим случаи упругого и неупругого ударов.
Абсолютно неупругим называется удар, после которого тела образуют единое тело, движущееся с определенной скоростью. Задача о скорости последнего решается с помощью закона сохранения импульса системы тел с массами $m_1$ и $m_2$ (если речь идет о двух телах) до и после удара:
$m_1{υ_1}↖{→}+m_2{υ_2}↖{→}=(m_1+m_2)υ↖{→}$
Очевидно, что кинетическая энергия тел при неупругом ударе не сохраняется (например, при ${υ_1}↖{→}=-{υ_2}↖{→}$ и $m_1=m_2$ она становится равной нулю после удара).
Абсолютно упругим называется удар, при котором сохраняется не только сумма импульсов, но и сумма кинетических энергий ударяющихся тел.
Для абсолютно упругого удара справедливы уравнения
$m_1{υ_1}↖{→}+m_2{υ_2}↖{→}=m_1{υ’_1}↖{→}+m_2{υ’_2}↖{→};$
${m_{1}υ_1^2}/{2}+{m_{2}υ_2^2}/{2}={m_1(υ’_1)^2}/{2}+{m_2(υ’_2)^2}/{2}$
где $m_1, m_2$ — массы шаров, $υ_1, υ_2$ —скорости шаров до удара, $υ’_1, υ’_2$ —скорости шаров после удара.
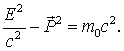
In physics, the energy–momentum relation, or relativistic dispersion relation, is the relativistic equation relating total energy (which is also called relativistic energy) to invariant mass (which is also called rest mass) and momentum. It is the extension of mass–energy equivalence for bodies or systems with non-zero momentum. It can be written as the following equation:
-

(1)

This equation holds for a body or system, such as one or more particles, with total energy E, invariant mass m0, and momentum of magnitude p; the constant c is the speed of light. It assumes the special relativity case of flat spacetime[1][2][3] and that the particles are free. Total energy is the sum of rest energy and kinetic energy, while invariant mass is mass measured in a center-of-momentum frame.
For bodies or systems with zero momentum, it simplifies to the mass–energy equation  , where total energy in this case is equal to rest energy (also written as E0).
, where total energy in this case is equal to rest energy (also written as E0).
The Dirac sea model, which was used to predict the existence of antimatter, is closely related to the energy–momentum relation.
Connection to E = mc2[edit]

The energy–momentum relation is consistent with the familiar mass–energy relation in both its interpretations: E = mc2 relates total energy E to the (total) relativistic mass m (alternatively denoted mrel or mtot ), while E0 = m0c2 relates rest energy E0 to (invariant) rest mass m0.
Unlike either of those equations, the energy–momentum equation (1) relates the total energy to the rest mass m0. All three equations hold true simultaneously.
Special cases[edit]
- If the body is a massless particle (m0 = 0), then (1) reduces to E = pc. For photons, this is the relation, discovered in 19th century classical electromagnetism, between radiant momentum (causing radiation pressure) and radiant energy.
- If the body’s speed v is much less than c, then (1) reduces to E = 1/2m0v2 + m0c2; that is, the body’s total energy is simply its classical kinetic energy (1/2m0v2) plus its rest energy.
- If the body is at rest (v = 0), i.e. in its center-of-momentum frame (p = 0), we have E = E0 and m = m0; thus the energy–momentum relation and both forms of the mass–energy relation (mentioned above) all become the same.
A more general form of relation (1) holds for general relativity.
The invariant mass (or rest mass) is an invariant for all frames of reference (hence the name), not just in inertial frames in flat spacetime, but also accelerated frames traveling through curved spacetime (see below). However the total energy of the particle E and its relativistic momentum p are frame-dependent; relative motion between two frames causes the observers in those frames to measure different values of the particle’s energy and momentum; one frame measures E and p, while the other frame measures E′ and p′, where E′ ≠ E and p′ ≠ p, unless there is no relative motion between observers, in which case each observer measures the same energy and momenta. Although we still have, in flat spacetime:

The quantities E, p, E′, p′ are all related by a Lorentz transformation. The relation allows one to sidestep Lorentz transformations when determining only the magnitudes of the energy and momenta by equating the relations in the different frames. Again in flat spacetime, this translates to;

Since m0 does not change from frame to frame, the energy–momentum relation is used in relativistic mechanics and particle physics calculations, as energy and momentum are given in a particle’s rest frame (that is, E′ and p′ as an observer moving with the particle would conclude to be) and measured in the lab frame (i.e. E and p as determined by particle physicists in a lab, and not moving with the particles).
In relativistic quantum mechanics, it is the basis for constructing relativistic wave equations, since if the relativistic wave equation describing the particle is consistent with this equation – it is consistent with relativistic mechanics, and is Lorentz invariant. In relativistic quantum field theory, it is applicable to all particles and fields.[4]
Origins and derivation of the equation[edit]
The Energy–momentum relation was first established by Paul Dirac in 1928 under the form  , where V is the amount of potential energy.[5]
, where V is the amount of potential energy.[5]
The equation can be derived in a number of ways, two of the simplest include:
- From the relativistic dynamics of a massive particle,
- By evaluating the norm of the four-momentum of the system. This method applies to both massive and massless particles, and can be extended to multi-particle systems with relatively little effort (see § Many-particle systems below).
Heuristic approach for massive particles[edit]
For a massive object moving at three-velocity u = (ux, uy, uz) with magnitude |u| = u in the lab frame:[1]

is the total energy of the moving object in the lab frame,

is the three dimensional relativistic momentum of the object in the lab frame with magnitude |p| = p. The relativistic energy E and momentum p include the Lorentz factor defined by:

Some authors use relativistic mass defined by:

although rest mass m0 has a more fundamental significance, and will be used primarily over relativistic mass m in this article.
Squaring the 3-momentum gives:

then solving for u2 and substituting into the Lorentz factor one obtains its alternative form in terms of 3-momentum and mass, rather than 3-velocity:

Inserting this form of the Lorentz factor into the energy equation gives:

followed by more rearrangement it yields (1). The elimination of the Lorentz factor also eliminates implicit velocity dependence of the particle in (1), as well as any inferences to the «relativistic mass» of a massive particle. This approach is not general as massless particles are not considered. Naively setting m0 = 0 would mean that E = 0 and p = 0 and no energy–momentum relation could be derived, which is not correct.
Norm of the four-momentum[edit]

The energy and momentum of an object measured in two inertial frames in energy–momentum space – the yellow frame measures E and p while the blue frame measures E′ and p′. The green arrow is the four-momentum P of an object with length proportional to its rest mass m0. The green frame is the centre-of-momentum frame for the object with energy equal to the rest energy. The hyperbolae show the Lorentz transformation from one frame to another is a hyperbolic rotation, and ϕ and ϕ + η are the rapidities of the blue and green frames, respectively.
Special relativity[edit]
In Minkowski space, energy (divided by c) and momentum are two components of a Minkowski four-vector, namely the four-momentum;[6]

(these are the contravariant components).
The Minkowski inner product ⟨ , ⟩ of this vector with itself gives the square of the norm of this vector, it is proportional to the square of the rest mass m of the body:

a Lorentz invariant quantity, and therefore independent of the frame of reference. Using the Minkowski metric η with metric signature (− + + +), the inner product is

and

so

or, in natural units where c = 1,
- .

General relativity[edit]
In general relativity, the 4-momentum is a four-vector defined in a local coordinate frame, although by definition the inner product is similar to that of special relativity,
in which the Minkowski metric η is replaced by the metric tensor field g:

solved from the Einstein field equations. Then:[7]

Performing the summations over indices followed by collecting «time-like», «spacetime-like», and «space-like» terms gives:

where the factor of 2 arises because the metric is a symmetric tensor, and the convention of Latin indices i, j taking space-like values 1, 2, 3 is used. As each component of the metric has space and time dependence in general; this is significantly more complicated than the formula quoted at the beginning, see metric tensor (general relativity) for more information.
Units of energy, mass and momentum[edit]
In natural units where c = 1, the energy–momentum equation reduces to

In particle physics, energy is typically given in units of electron volts (eV), momentum in units of eV·c−1, and mass in units of eV·c−2. In electromagnetism, and because of relativistic invariance, it is useful to have the electric field E and the magnetic field B in the same unit (Gauss), using the cgs (Gaussian) system of units, where energy is given in units of erg, mass in grams (g), and momentum in g·cm·s−1.
Energy may also in theory be expressed in units of grams, though in practice it requires a large amount of energy to be equivalent to masses in this range. For example, the first atomic bomb liberated about 1 gram of heat, and the largest thermonuclear bombs have generated a kilogram or more of heat. Energies of thermonuclear bombs are usually given in tens of kilotons and megatons referring to the energy liberated by exploding that amount of trinitrotoluene (TNT).
Special cases[edit]
Centre-of-momentum frame (one particle)[edit]
For a body in its rest frame, the momentum is zero, so the equation simplifies to

where m0 is the rest mass of the body.
Massless particles[edit]
If the object is massless, as is the case for a photon, then the equation reduces to

This is a useful simplification. It can be rewritten in other ways using the de Broglie relations:

if the wavelength λ or wavenumber k are given.
Correspondence principle[edit]
Rewriting the relation for massive particles as:

and expanding into power series by the binomial theorem (or a Taylor series):
![{displaystyle E=m_{0}c^{2}left[1+{frac {1}{2}}left({frac {p}{m_{0}c}}right)^{2}-{frac {1}{8}}left({frac {p}{m_{0}c}}right)^{4}+cdots right],,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73e1b985b3bdff59b33935e9347e3eb6eb7aac22)
in the limit that u ≪ c, we have γ(u) ≈ 1 so the momentum has the classical form p ≈ m0u, then to first order in (p/m0c)2
(i.e. retain the term (p/m0c)2n
for n = 1 and neglect all terms for n ≥ 2) we have
![{displaystyle Eapprox m_{0}c^{2}left[1+{frac {1}{2}}left({frac {m_{0}u}{m_{0}c}}right)^{2}right],,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5705f3941aff6e1a40e6f8302c2b87b3eb139c8b)
or

where the second term is the classical kinetic energy, and the first is the rest energy of the particle. This approximation is not valid for massless particles, since the expansion required the division of momentum by mass. Incidentally, there are no massless particles in classical mechanics.
Many-particle systems[edit]
Addition of four momenta[edit]
In the case of many particles with relativistic momenta pn and energy En, where n = 1, 2, … (up to the total number of particles) simply labels the particles, as measured in a particular frame, the four-momenta in this frame can be added;

and then take the norm; to obtain the relation for a many particle system:

where M0 is the invariant mass of the whole system, and is not equal to the sum of the rest masses of the particles unless all particles are at rest (see mass in special relativity for more detail). Substituting and rearranging gives the generalization of (1);
-
(2)

The energies and momenta in the equation are all frame-dependent, while M0 is frame-independent.
Center-of-momentum frame[edit]
In the center-of-momentum frame (COM frame), by definition we have:

with the implication from (2) that the invariant mass is also the centre of momentum (COM) mass–energy, aside from the c2 factor:

and this is true for all frames since M0 is frame-independent. The energies ECOM n are those in the COM frame, not the lab frame. However, many familiar bound systems have the lab frame as COM frame, since the system itself is not in motion and so the momenta all cancel to zero. An example would be a simple object (where vibrational momenta of atoms cancel) or a container of gas where the container is at rest. In such systems, all the energies of the system are measured as mass. For example the heat in an object on a scale, or the total of kinetic energies in a container of gas on the scale, all are measured by the scale as the mass of the system.
Rest masses and the invariant mass[edit]
Either the energies or momenta of the particles, as measured in some frame, can be eliminated using the energy momentum relation for each particle:

allowing M0 to be expressed in terms of the energies and rest masses, or momenta and rest masses. In a particular frame, the squares of sums can be rewritten as sums of squares (and products):


so substituting the sums, we can introduce their rest masses mn in (2):

The energies can be eliminated by:

similarly the momenta can be eliminated by:

where θnk is the angle between the momentum vectors pn and pk.
Rearranging:

Since the invariant mass of the system and the rest masses of each particle are frame-independent, the right hand side is also an invariant (even though the energies and momenta are all measured in a particular frame).
Matter waves[edit]
Using the de Broglie relations for energy and momentum for matter waves,

where ω is the angular frequency and k is the wavevector with magnitude |k| = k, equal to the wave number, the energy–momentum relation can be expressed in terms of wave quantities:

and tidying up by dividing by (ħc)2 throughout:
-
(3)

This can also be derived from the magnitude of the four-wavevector

in a similar way to the four-momentum above.
Since the reduced Planck constant ħ and the speed of light c both appear and clutter this equation, this is where natural units are especially helpful. Normalizing them so that ħ = c = 1, we have:

Tachyon and exotic matter[edit]
The velocity of a bradyon with the relativistic energy–momentum relation

can never exceed c. On the contrary, it is always greater than c for a tachyon whose energy–momentum equation is[8]

By contrast, the hypothetical exotic matter has a negative mass[9] and the energy–momentum equation is

See also[edit]
- Mass–energy equivalence
- Four-momentum
- Mass in special relativity
References[edit]
- ^ a b Kleppner, Daniel; Robert J. Kolenkow (2010) [1973]. An Introduction to Mechanics. Cambridge University Press. pp. 499–500. ISBN 978-0-521-19821-9.
- ^ J.R. Forshaw; A.G. Smith (2009). Dynamics and Relativity. Wiley. pp. 149, 249. ISBN 978-0-470-01460-8.
- ^ D. McMahon (2006). Relativity. DeMystified. Mc Graw Hill (USA). p. 20. ISBN 0-07-145545-0.
- ^ D. McMahon (2008). Quantum Field Theory. DeMystified. Mc Graw Hill (USA). pp. 11, 88. ISBN 978-0-07-154382-8.
- ^ Eisberg, R., Resnick, R. (1985) Quantum Physics of Atoms, Molecules, Solids, Nuclei, and Particles. 2nd Edition, John Wiley & Sons. New York. p.132.ISBN 0-471-87373-X
- ^ J.R. Forshaw; A.G. Smith (2009). Dynamics and Relativity. Wiley. pp. 258–259. ISBN 978-0-470-01460-8.
- ^ J.A. Wheeler; C. Misner; K.S. Thorne (1973). Gravitation. W.H. Freeman & Co. pp. 201, 649, 1188. ISBN 0-7167-0344-0.
- ^ G. Feinberg (1967). «Possibility of faster-than-light particles». Physical Review. 159 (5): 1089–1105. Bibcode:1967PhRv..159.1089F. doi:10.1103/PhysRev.159.1089.
- ^ Z.Y.Wang (2016). «Modern Theory for Electromagnetic Metamaterials». Plasmonics. 11 (2): 503–508. doi:10.1007/s11468-015-0071-7. S2CID 122346519.
- A. Halpern (1988). 3000 Solved Problems in Physics, Schaum Series. McGraw-Hill. pp. 704–705. ISBN 978-0-07-025734-4.
- G. Woan (2010). The Cambridge Handbook of Physics Formulas. Cambridge University Press. p. 65. ISBN 978-0-521-57507-2.
- C.B. Parker (1994). McGraw-Hill Encyclopaedia of Physics (2nd ed.). McGraw-Hill. pp. 1192, 1193. ISBN 0-07-051400-3.
- R.G. Lerner; G.L. Trigg (1991). Encyclopaedia of Physics (2nd ed.). VHC Publishers. p. 1052. ISBN 0-89573-752-3.
Физика, 11 класс
Урок №21. Релятивистские эффекты
На уроке рассматриваются понятия: энергия покоя, полная энергия частиц; связь массы и энергии в специальной теории относительности; релятивистский импульс частицы, релятивистская кинетическая энергия; принцип соответствия.
Глоссарий урока:
Релятивистская механика — раздел физики, где описывается движение частиц со скоростями близкими к скорости света.
Закон взаимосвязи энергии и массы — тело обладает энергией и при нулевой скорости, такую энергию называют энергией покоя.
Релятивистская энергия составляет сумму собственной энергии частицы и релятивистской кинетической энергии.
Безмассовыми называют частицы массы, которых в состоянии покоя равны нулю, они существуют только в движении, при этом во всех инерциальных системах отсчёта их импульс и энергия не равны нулю.
Массовыми называют частицы, для которых масса является важной характеристикой, мерой инертности тела.
Принцип соответствия – это подтверждение законов Ньютона и классических представлений о пространстве и времени, рассматриваются как частный случай релятивистских законов при скоростях намного меньших скорость света.
Согласно принципу соответствия любая теория, претендующая на более глубокое описание явлений и на более широкую сферу применимости, должна включать предыдущую теорию, как предельный случай.
Обязательная литература:
- Мякишев Г.Я., Буховцев Б.Б., Сотский Н.Н. Физика.11 класс. Учебник для общеобразовательных организаций М.: Просвещение, 2017. – С. 239 – 241.
- Рымкевич А.П. Физика. Задачник. 10-11 классы. – М.: Дрофа, 2013. — С. 147 – 149
Дополнительная литература:
- Анциферов Л.И., Физика: электродинамика и квантовая физика. 11кл. Учебник для общеобразовательных учреждений – М.: Мнемозина, 2001. – С. 253-260.
- Кирик Л.А., Генденштейн Л.Э., Гельфгат И.М.. Задачи по физике. 10-11 классы для профильной школы. – М.: Илекса, 2010. – С. 311-315.
- Айзексон У., Эйнштейн. Жизнь гения; пер. с анг. А.Ю. Каннуниковой. – М: АСТ, 2016 – С.144-157
Основное содержание темы
«Основы физики претерпели неожиданные и радикальные изменения благодаря смелости молодого и революционно мыслящего гения.»
Вернер Гейзенберг
Эти слова и множество других восхищённых эпитетов будут высказаны в адрес гениального учёного Альберта Эйнштейна. Эйнштейн не боялся опровергать общепринятые утверждения. Он разрушил представление об абсолютном времени и незыблемости пространства. Его теория утверждала, что есть движущиеся системы координат со своим относительным временем. А пространство существует, пока в нём существует всё материальное. Время идёт тем медленнее, если быстрее движется тело. Такие удобные и понятные принципы классической физики: о постоянстве массы, длины, времени, скорости — опровергаются следствиями из постулатов специальной теории относительности Эйнштейна.

Альберт (Einstein) Эйнштейн
14 марта 1879 г. – 18 апреля 1955 г.
Физик-теоретик, один из основателей современной теоретической физики, лауреат Нобелевской премии по физике 1921 года, общественный деятель-гуманист.
По законам классической физики: масса – это мера инертности тела. Но Эйнштейн утверждает другое: масса – это мера энергии, содержащейся в теле.
Любое тело обладает энергией уже в силу своего существования. Альбертом Эйнштейном была установлена пропорциональность между энергией и массой:

На первый взгляд, простая формула, является фундаментальным законом природы, законом взаимосвязи энергии и массы.
Согласно этой формуле тело обладает энергией даже при нулевой скорости, в таком случае энергию называют E энергией покоя. А массу, которая входит в формулу Эйнштейна назовём m0 массой покоя.
Как же будет выглядеть закон взаимосвязи массы и энергии для движущегося тела? К нему добавляем радикал  (релятивистский множитель) из преобразований Лоренца:
(релятивистский множитель) из преобразований Лоренца:

Такую формулу называют релятивистской энергией или полной энергией движущегося тела.
Релятивистская механика — раздел физики, где описываются движения тел и частиц со скоростями близкими к скорости света, где используются преобразования Лоренца, перехода из одной инерциальной системы в другую, когда одна система движется относительно другой со скоростью вдоль оси ОХ.
Любые изменения физических величин, связанные с сокращением размеров:

эффект замедления времени:

изменение массы тела при изменении энергии:

закон сложения скоростей:

в специальной теории относительности называют релятивистскими изменениями.
По законам классической физики полная энергия равна сумме кинетической и потенциальной энергий тела или частицы

Отсюда выразим кинетическую энергию тела

Релятивистская энергия составляет сумму собственной энергии частицы и релятивистской кинетической энергии

В классической физике кинетическая энергия вычисляется по формуле

Получим ещё одно выражение

Выразим кинетическую энергию из формулы релятивистской энергии:

Поставим релятивистский радикал , который можно преобразовать при малых скоростях и получим релятивистскую кинетическую энергию частицы:
, который можно преобразовать при малых скоростях и получим релятивистскую кинетическую энергию частицы:

Или другой способ выражения кинетической энергии, если использовать классическую кинетическую энергию, то получим


— выражение для определения релятивистской кинетической энергии.
Путём не сложных математических вычислений можно доказать, что формула определения кинетической энергии в классической физике и формула кинетической энергии в релятивистской физике равны между собой.
и формула кинетической энергии в релятивистской физике равны между собой.
Давайте проверим работают ли главные законы механики — законы Ньютона в релятивистской физике.
Первый закон Ньютона: существуют системы отсчёта, называемые инерциальными, относительно которых тело движется прямолинейно и равномерно, если на него не действуют другие тела.
Первый постулат СТО Эйнштейна: все физические явления протекают одинаково во всех инерциальных системах отсчёта, или никакими опытами, проводимыми в инерциальной системе отсчёта, невозможно установить её движение относительно других инерциальных систем.
Внимание! Они не противоречат друг другу!
Третий закон Ньютона: силы с которыми тела действуют друг на друга равны по модулю и направлены вдоль одной прямой в противоположные стороны. Этот закон тоже работает в релятивистской физике (смотрите первый постулат СТО).
А что же со вторым законом классической механики? Второй закон Ньютона: ускорение тела прямо пропорционально силе и обратно пропорционально его массе.

Рассмотрим предельный случай: если на тело долгое время t (время стремится к бесконечности) действовать с постоянной силой F = const, то ускорение будет постоянным a = const. Ускорение в свою очередь, зависит от скорости, с которой движется тело:
(время стремится к бесконечности) действовать с постоянной силой F = const, то ускорение будет постоянным a = const. Ускорение в свою очередь, зависит от скорости, с которой движется тело:

Отсюда  скорость тоже будет стремиться к бесконечности, а это невозможно (смотрите второй постулат СТО), так как скорость тела или частицы не может быть больше предельного значения скорости света (
скорость тоже будет стремиться к бесконечности, а это невозможно (смотрите второй постулат СТО), так как скорость тела или частицы не может быть больше предельного значения скорости света ( )!
)!
Но давайте рассмотрим другую формулировку второго закона Ньютона, когда сила прямо пропорциональна изменению импульсов тела ко времени этого изменения:

В классической механике импульс равен произведению массы тела или частицы на его скорость:  , где m – постоянная величина, мера инертности тела.
, где m – постоянная величина, мера инертности тела.
В релятивистской механике выражение импульса можно записать, используя преобразования Лоренца:

При скоростях намного меньших, чем скорость света 𝟅 с, формула принимает вид классической механики Ньютона
с, формула принимает вид классической механики Ньютона

Эти проявления — подтверждение законов Ньютона и классических представлений о пространстве и времени, рассматривают как частный случай релятивистских законов при скоростях намного меньших скорости света и называют принципом соответствия. Согласно принципу соответствия любая теория, претендующая на более глубокое описание явлений и на более широкую сферу применимости, должна включать предыдущую теорию, как предельный случай. То есть законы классической механики подтверждаются релятивистской, но только для частиц или тел, движущихся с малыми скоростями.
В природе существуют такие частицы (фотоны, мюоны, нейтрино), скорость которых равна или близка к скорости света. Массы таких частиц в состоянии покоя равны нулю, эти частицы называют безмассовыми. Они существуют только в движении, но во всех инерциальных системах отсчёта их импульс и энергия не равны нулю. Тогда подтверждается утверждение Эйнштейна, что масса – это мера энергии тела. Частицы, для которых масса является важной характеристикой — мерой инертности, называют массовыми.
Найдём соотношение между энергией и импульсом:



Взаимно уничтожаются подкоренные выражения, сокращается произведение массы на скорость света, и мы получим простое соотношение энергии и импульса, где нет зависимости от массы.
Энергия и импульс связаны соотношением

Поэтому во всех инерциальных системах отсчёта импульс и энергия не равны нулю. При превращениях элементарных частиц, обладающих массой покоя  , в частицы у которых
, в частицы у которых  , их энергия покоя целиком превращается в кинетическую энергию вновь образовавшихся частиц. Этот факт является наиболее очевидным экспериментальным доказательством существования энергии покоя.
, их энергия покоя целиком превращается в кинетическую энергию вновь образовавшихся частиц. Этот факт является наиболее очевидным экспериментальным доказательством существования энергии покоя.
Во всех инерциальных системах отсчёта импульс частицы и её энергия связаны соотношением:

или

— эта формула является фундаментальным соотношением энергии и импульса для массовых частиц релятивистской механики. Эти соотношения экспериментально подтверждены.
Следовательно, для безмассовых частиц, где  или
или  , выражение примет вид
, выражение примет вид

Основное выражение энергии через её импульс записывают так:

Отсюда, масса, движущейся частицы, будет равна

Если частица покоится, то её значение можно определить из основной формулы Эйнштейна взаимосвязи массы и энергии:

В обычных условиях, при нагревании тела или его охлаждении, при химической реакции, эти приращения массы происходят, их можно вычислить, но изменения массы не так заметны. Энергию, полученную из расщепления ядер на атомных электростанциях, используют на благо человека, где незначительные массы радиоактивного топлива вырабатывают энергию, питающую электроэнергией огромные города. Но, к сожалению, такую энергию, высвобождающуюся при цепной реакции, люди использовали и военных целях, для уничтожения городов, людей. Поэтому, только в последствии, понимая ответственность за свои открытия, учёные искренне становятся общественными деятелями: правозащитниками и борцами за мир.

Рассмотрим задачи тренировочного блока урока:
1. Чтобы выработать количество энергии, которой обладает тело массой 1 кг, Красноярской ГЭС потребуется времени _________ суток (1,5·107; 173,6; 182,3). Мощность Красноярской ГЭС 6000МВт.
Дано:
m = 1 кг
P = 6000 МВт = 6·109 Вт
t — ? (сутки)
Воспользуемся выражением, описывающим зависимость энергии тела от массы:

И зависимостью мощности от работы и времени:





Выразим секунды в часах, а затем в сутках:



Ответ: 173,6 суток.
2. Чему равен импульс протона, летящего со скоростью 8,3·107 м/с? На сколько будет допущена ошибка, если пользоваться формулами классической физики? Данные поученных вычислений занесите в таблицу:
|
Физические величины |
Показатели |
|
Масса покоя протона, m |
1,67·10-27 кг |
|
Скорость света, с |
3·108 м/с |
|
Скорость движения протона, 𝟅 |
8,3·107 м/с |
|
Импульс протона по классическим законам, рк |
? |
|
Импульс протона по релятивистским законам, рр |
? |
|
Разница в вычислениях импульса протона, |
? |

Воспользуемся формулами для определения импульса релятивистским и классическим способами:




Вычислим разницу показаний:

|
Физические величины |
Показатели |
|
Масса покоя протона, m |
1,67·10-27кг |
|
Скорость света, с |
3·108 м/с |
|
Скорость движения протона, 𝟅 |
8,3·107 м/с |
|
Импульс протона по классическим законам, рк |
1,38·10-19кг·м/с |
|
Импульс протона по релятивистским законам, рр |
5,2·10-19 кг·м/с |
|
Разница в вычислениях импульса протона, |
в 3,8 раза |
