Теоретическая механика (стр. 1 )
 |
Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 |

Министерство образования Российской Федерации
Владивостокский государственный университет
экономики и сервиса
Г. Л. ОВСЯННИКОВА
Рецензент , канд. техн. наук, профессор каф. ФХ и ПМ ВГУЭС
Ч 81 ТЕОРЕТИЧЕСКАЯ МЕХАНИКА: Учебное пособие. Ч. 1. – Владивосток: Изд-во ВГУЭС, 2003 – 128с.
Учебное пособие представляет собой комплекс, содержащий основные сведения о теории, необходимые для самостоятельного решения задач. В каждом разделе даны рекомендации о последовательности решения различных типов задач и приведены подробные методические указания к решению подобных задач. Может использоваться как теоретическая часть при подготовке к сдаче экзамена или зачета, так и в качестве методических указаний к решению задач на практических занятиях, при выполнении контрольных работ заочниками и расчётно-графических заданий.
Для студентов всех форм обучения.
ã Издательство Владивостокского
экономики и сервиса, 2003
Глава 1. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ
§ 1. Сложение двух сходящихся сил
Если в одной точке к телу приложены две силы под углом друг к другу, то их сложение выполняется по правилу параллелограмма.
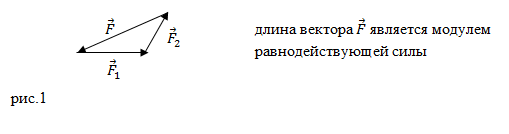
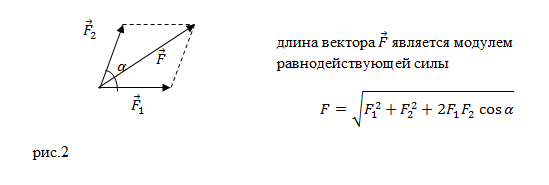
Модуль равнодействующей R может быть определен аналитически из треугольника АВС с помощью теоремы косинусов (рис. 1):

так как  .
.
Направление равнодействующей определяется углами  и
и  , которые можно рассчитать, применив теорему синусов. Для треугольника ABC
, которые можно рассчитать, применив теорему синусов. Для треугольника ABC
 , (1)
, (1)
откуда, учитывая, что  , получим
, получим
 ,
,  . (2)
. (2)
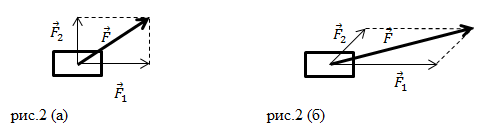
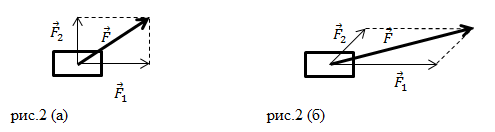
Вместо параллелограмма сил можно строить силовой треугольник (рис. 2). Выбрав любую точку на плоскости рисунка, проводят из нее, сохраняя масштаб, вектор, равный и параллельный одной из заданных сил, например F1.


Из конца вектора F1 проводят вектор, равный и параллельный второй силе, F2. Начало первого вектора соединяют с концом второго, замыкая треугольник. Замыкающая сторона треугольника в данном масштабе представляет собой искомую равнодействующую. Модуль и направление равнодействующей определяют аналитически, как было показано выше.
При построении треугольника сил необходимо придерживаться правила: стрелки составляющих векторов направлены в одну сторону, а равнодействующей – им навстречу.
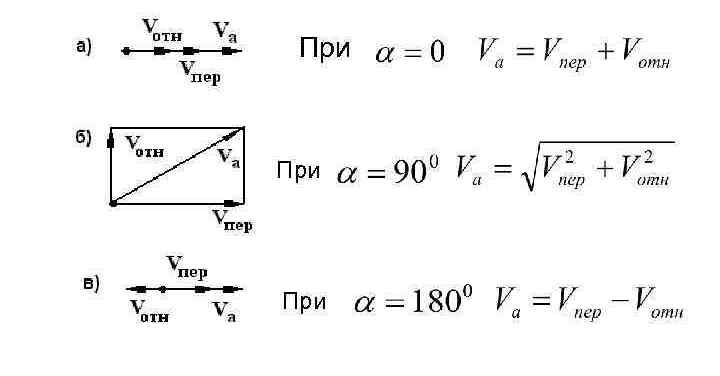
Частные случаи: 1) если  , т. е. силы действуют по одной прямой в одну строну, то
, т. е. силы действуют по одной прямой в одну строну, то
 ;
;
2) если , т. е. силы действуют по одной прямой в разные стороны, то
;
3) если  , то
, то 
Заметим, что определение равнодействующей двух сил по правилу параллелограмма или треугольника называется векторным, или геометрическим, сложением.
Задача 1. Определить равнодействующую двух сил  и , модули которых соответственно равны Р1 = 40 Н и Р2 = 80 Н; сила направлена горизонтально вправо, а образует с угол a = 120° (рис. 3, а).
и , модули которых соответственно равны Р1 = 40 Н и Р2 = 80 Н; сила направлена горизонтально вправо, а образует с угол a = 120° (рис. 3, а).

Задачу можно решить графоаналитическим методом, используя либо правило параллелограмма, либо правило треугольника.
Решение 1 – по правилу параллелограмма:
1. Используя условие задачи и приблизительно соблюдая масштаб, изображаем параллелограмм ABCD (рис. 3, б). Порядок построения такой: из точки А проводим отрезок , затем из той же точки А под углом 120° к отрезку АВ проводим отрезок , из точек В и С проводим прямые BD || АС и CD || AB и, наконец, проводим диагональ
2. Используя формулу (1), можем найти модуль равнодействующей:


Имея в виду, что cos120° = – sin 30° = – 0,5, получаем
 Н.
Н.
3. Применяя к D ABD (или к D ACD) (см. рис. 3, б) теорему синусов, получаем
 ,
,
 и
и  ,
,
 ;
; 
Таким образом, вектор равнодействующей  перпендикулярен к силе ,
перпендикулярен к силе ,
Угол j2 можно найти либо как разность

либо из теоремы синусов:
 и j2 = 30°.
и j2 = 30°.
Один и тот же результат, полученный различными путями, подтверждает правильность решения задачи.
Ответ. Равнодействующая данных сил равна 69,3 Н и линия ее действия образует с направлением силы прямой угол.
Решение 2 – по правилу треугольника.
1. Используя условие задачи, строим треугольник сил ABC (рис. 3, в). Порядок построения такой: из точки А проведем отрезок  . Затем из точки В под углом a = 120° к направлению проводим отрезок
. Затем из точки В под углом a = 120° к направлению проводим отрезок  и, наконец, «замкнем» треугольник отрезком АС, который изобразит искомую равнодействующую
и, наконец, «замкнем» треугольник отрезком АС, который изобразит искомую равнодействующую 
В получившемся треугольнике

2. Применяем к треугольнику ABC известную из тригонометрии теорему косинусов:

откуда модуль равнодействующей
 Н.
Н.
3. Углы j1 и j2, определяющие направление равнодействующей относительно заданных сил, находим, как и в первом решении, по теореме синусов.
§ 2. Разложение силы на две сходящиеся составляющие
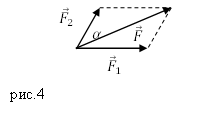
Любую силу можно рассмотреть как равнодействующую двух произвольных, сходящихся под углом сил. Модуль и направление составляющих сил зависят от угла между ними. Можно построить множество параллелограммов, для которых данная сила R будет служить диагональю (рис. 4). Чтобы задача стала определенной, нужно знать одно из дополнительных условий: модули обеих составляющих, модуль и направление одной из составляющих, направление обеих составляющих, модуль одной из составляющих и направление другой.

Каждую из задач можно решить двумя способами: графическим и графоаналитическим.
При графическом решении задачи заданную силу откладывают на чертеже в выбранном масштабе, а затем производят несложные геометрические построения в зависимости от заданных условий.
Для графоаналитического решения нет надобности соблюдать масштаб, но при построении нужно сохранять примерное направление сил. Модули составляющих сил либо углы, определяющие их направление, вычисляют, пользуясь формулами (1) и (2).
Например, если заданы только направления составляющих сил, то из точки А вектора R (рис. 5) проводим линии действия составляющих AM и AN под известными углами и  Затем из точки В проводим прямые, параллельные этим линиям, т. е. строим параллелограмм, в котором стороны АС и AD представляют собой искомые силы F1 и F2 в данном масштабе.
Затем из точки В проводим прямые, параллельные этим линиям, т. е. строим параллелограмм, в котором стороны АС и AD представляют собой искомые силы F1 и F2 в данном масштабе.
При графоаналитическом решении модули сил F1 и F2 определяют по формулам, полученным из выражения (1):
 ;
;  .
.
Задача 2. Определить силы, растягивающие нити АВ и ВС, которые удерживают груз весом G = 20 Н в равновесии (рис. 6, а).
Решение. Графическое (рис. 6, б): из точки О на плоскости рисунка строим в выбранном масштабе вектор силы G. Из точки О проводим прямые, параллельные нитям ОМ и ON. Затем из конца вектора G проводим прямые KL и КЕ, чтобы получился параллелограмм, у которого стороны OL и ОЕ соответствуют в данном масштабе искомым силам.

Графоаналитическое (рис. 6, б): Так как известны все углы в треугольнике ОЕК, а также модуль силы G, можно использовать теорему синусов для определения модулей сил F1 и F2:
 ,
,
где 

 откуда
откуда

Задача 3. Фонарь весом 80 Н подвешен на кронштейне ABC, укрепленном на вертикальной стене (рис. 7). Определить усилия, возникшие в горизонтальном стержне СВ и наклонной тяге АВ после подвески фонаря, если СВ = 1 м и АВ = 1,2 м. Соединения в точках А, В и С кронштейна – шарнирные.
Решим задачу графоаналитическим методом по правилу параллелограмма.
1. Используя рис. 7, на котором изображен кронштейн, строим параллелограмм сил. Через произвольную точку а (рис. 29) проводим прямые A1A2 и С1С2, параллельные соответственно тяге АВ и стержню СВ (рис. 7).

Из той же точки а откладываем вертикально вниз отрезок ab, который изображает силу  Из точки b проводим прямые bd || С1С2 и bc || A1A2. В получившемся параллелограмме adbc стороны ad и ас изображают соответственно искомые усилия и
Из точки b проводим прямые bd || С1С2 и bc || A1A2. В получившемся параллелограмме adbc стороны ad и ас изображают соответственно искомые усилия и  .
.
2. Теперь имеются две геометрические фигуры – треугольник ABC (см. рис. 7), изображающий заданный кронштейн, и силовой параллелограмм (рис. 8).

Геометрически D ABC (рис. 7) и D adb, или, что все равно, D abc
(рис. 8), подобны между собой.
Используя свойство подобных треугольников (замечаем, что db = ac = Nc), получаем
 .
.
3. Решая получившиеся пропорции, находим
 и
и  .
.
Неизвестную в кронштейне длину АС найдем по теореме Пифагора (из условия задачи ясно, что угол АСВ – прямой)
 м.
м.
Подставляя в выражения для NА и Nc исходные данные, получаем
 H;
H;  H.
H.
Задача 4. При помощи двух нерастяжимых нитей АС и ВС удерживается груз, вес которого 12 Н. Положение нитей и груза показано на рис. 9. Определить натяжения нитей.
Решим задачу графоаналитическим методом по правилу треугольника с использованием тригонометрических соотношений.
1. Прежде всего необходимо силу G = =12 Н разложить на две составляющие, линии действия которых совпадают с направлениями линий АС и ВС.


2. Изобразим силу  отрезком (рис. 10). Затем проведем из точки С прямую CN, продолжив АС, а из точки L – прямую LM параллельно положению нити ВС. Получим силовой треугольник CKL, в котором стороны СK и KL изображают искомые силы натяжения нитей АС и ВС.
отрезком (рис. 10). Затем проведем из точки С прямую CN, продолжив АС, а из точки L – прямую LM параллельно положению нити ВС. Получим силовой треугольник CKL, в котором стороны СK и KL изображают искомые силы натяжения нитей АС и ВС.
3. Если в треугольнике CKL известны углы a, b и g, то задачу легко решить по теореме синусов:
 .
.
4. Из построения силового треугольника следует, что

(для наглядности положение нитей относительно вектора G показано на рис. 10 штриховой линией). А так как треугольники D АСЕ и D BCD – прямоугольные, то из D ACE


Угол g легко найдем как дополнение к Ð 180°:
 .
.
5. И теперь, зная углы a, b и g, из уравнения (1)
 Н
Н
 Н.
Н.
Таким образом, нить CA растягивается усилием, равным 6,25 Н, а нить СВ – усилием 10,75 Н.
§ 3. Сложение плоской системы сходящихся сил.
Силовой многоугольник
Равнодействующую плоскость системы сходящихся сил можно найти графически с помощью построения силового многоугольника.
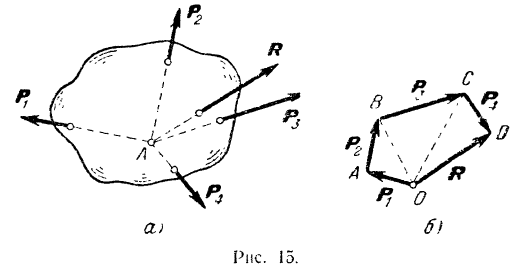
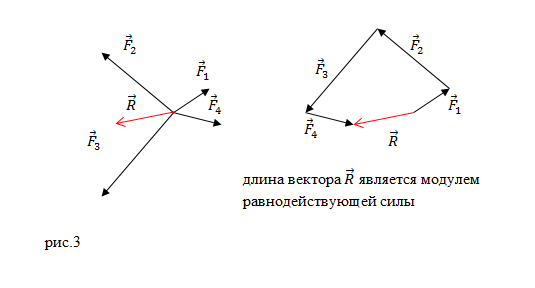
Пусть дана система сил F1, F2, F3, F4 (рис. 11, a). Выберем на плоскости чертежа произвольную точку O (рис. 11, б). Из нее проводим в выбранном масштабе вектор, равный по модулю и параллельный силе f1. Из конца этого вектора проводим вектор, равный силе F2. Из конца вектора силы F2 строим вектор, равный и параллельный силе F3, и т. д. Соединив точку О с концом последнего вектора, получим замыкающую сторону многоугольника ON, которая в данном масштабе представляет собой искомую равнодействующую системы – R. Действительно, диагональ силового многоугольника OL равна вектору R1, который является геометрической суммой векторов F1 и F2: R1= F1+ F2 . Вторая диагональ ОМ равна R2= R1+ F3= F1+ F2+ F3. Очевидно, что замыкающая сторона R = R2 + R4 = F1 + F2 + F3 + F4 есть равнодействующая системы, равная геометрической сумме всех заданных сил. Точка приложения равнодействующей совпадает с точкой А.

Модуль и направление равнодействующей не изменятся, если изменить порядок, в котором откладываются векторы сил при построении силового многоугольника.
Следствие. Если система сил является уравновешенной, то равнодействующая системы равна нулю (R = 0). В этом случае силовой многоугольник замкнут, т. е. конец последнего вектора должен совпадать с началом первого.
Замкнутость силового многоугольника является геометрическим условием равновесия плоской системы сходящихся сил. Это условие используют при решении задач на равновесие.
Задача 5. Шар весом G = 20 Н (рис. 12, а) подвешен к вертикальной стене при помощи нити СВ. Определить натяжение нити и силу давления шара на стену, если угол между стеной и нитью a = 30°.
1. Рассмотрим равновесие шара под действием трех сил: силы тяжести G, реакции нити RC и реакции стены RA. Линии действия всех сил пересекаются в центре шара 0.

2. Строим замкнутый силовой треугольник, начиная с известного вектора G (рис. 12, б). Модули неизвестных сил RA и RC, равные соответственно давлению шара на стену и натяжению нити, определим из полученного треугольника:
 ,
,

 .
.
Задача 6. Определить равнодействующую четырех сил: P1=18 Н, Р2 = 10 Н, Р3 = 6 Н и Р4 = 8 Н, приложенных к одной точке А и направленных, как показано на рис. 13.
Решение – методом проекций на координатные оси.
1. Изображаем на рисунке четыре данные силы и выбираем расположение осей проекций. В данном случае удобно начало осей поместить в точке А, а оси совместить с силами и  (рис. 13, а).
(рис. 13, а).

2. Находим проекции данных сил на ось х (рис. 13,б):


3. Находим проекции данных сил на ось у (рис. 13,в):


4. Находим проекции искомой равнодействующей на оси х и у:


Проекция на ось х получается отрицательной, а на ось у положительной. Значит вектор  заменяющий действие четырех данных сил и приложенный к точке А, должен быть направлен относительно оси у вверх, а относительно оси х – влево. Положение равнодействующей R показано отдельно на рис. 13, г.
заменяющий действие четырех данных сил и приложенный к точке А, должен быть направлен относительно оси у вверх, а относительно оси х – влево. Положение равнодействующей R показано отдельно на рис. 13, г.
5. Находим модуль равнодействующей:
 Н.
Н.
6. Находим угол j, определяющий направление R относительно оси у (см. рис. 13, а):

и, следовательно,  .
.
Для определения угла j использован D ABC (см. рис. 13, г), в котором  Поэтому XR не имеет значения и в выражение tgj подставлена его абсолютная величина.
Поэтому XR не имеет значения и в выражение tgj подставлена его абсолютная величина.
Угол j можно найти при помощи синуса:

Таким образом, равнодействующая четырех заданных сил равна 26,7 Н, направлена под углом 40°30′ к положительному направлению оси у и под углом 90° + 40°30′ = 130°30′ к положительному направлению оси х.
Задача 7. К концу В веревки АВ прикреплено кольцо, на которое действуют четыре силы: Р1 = 40 H, Р2 = 25 H, P3 = 25 H и P4 = 20 H, направленные, как показано на рис. 14, а (сила Р2 горизонтальна). Определить усилие, возникшее в веревке, и ее направление относительно горизонтали.
Решение – методом проекций.
1. Веревка будет натянута равнодействующей четырех заданных сил. Следовательно, определив модуль равнодействующей, получим усилие, возникшее в веревке, а определив направление равнодействующей, найдем положение натянутой веревки.
2. Изобразим точку В с действующими на нее силами на отдельном рисунке (рис. 14, б) и совместим оси проекций с силами  и
и  .
.
3. Найдем проекции заданных сил на ось х:



4. Найдем проекции заданных сил на ось у:


5. Найдем проекции равнодействующей на оси х и у:


6. Найдем модуль равнодействующей:
 H.
H.
Как видно, в данном случае проекция равнодействующей на ось у очень мала по сравнению с проекцией на ось х. Поэтому равнодействующая практически численно равна проекции на ось х. Следовательно, можно принять, что вектор равнодействующей направлен вдоль оси х вправо (проекция на ось х положительна), т. е. горизонтально.
Таким образом, четыре заданные силы натягивают веревку равнодействующей силой R, приложенной к точке В (к кольцу на конце веревки) и направленной горизонтально.
Другой конец веревки (точка А, рис. 14, а) закреплен, поэтому на кольцо В со стороны веревки действует еще одна сила, численно равная равнодействующей, но направленная в противоположную сторону. Эта сила называется уравновешивающей системы четырех сил.
На рис. 14, в показаны равнодействующая R и уравновешивающая  .
.
Задача 8. На конце В горизонтального стержня АВ необходимо прикрепить две нити с грузами Р1 = 4 кH и Р2 = 0,8 кH, как показано на рис. 15, а. Под каким углом к этому стержню следует присоединить второй стержень ВС, чтобы стержень АВ растягивался силой РА = 2 кН. Какое усилие при этом будет испытывать стержень ВС?
Соединения стержней между собой и с опорами шарнирные.
Решение – методом проекций.
1. На точку В действуют три силы: – вертикально вниз,  – вдоль нити от точки В к блоку (под углом 30° к горизонтали) и противодействие (реакция) стержня тому растягивающему действию, которое испытывает стержень. Изобразим эти три силы на рис. 15, б и найдем их равнодействующую, вдоль направления которой необходимо установить стержень ВС.
– вдоль нити от точки В к блоку (под углом 30° к горизонтали) и противодействие (реакция) стержня тому растягивающему действию, которое испытывает стержень. Изобразим эти три силы на рис. 15, б и найдем их равнодействующую, вдоль направления которой необходимо установить стержень ВС.
2. Оси проекций совместим с силами и  и определим проекции искомой равнодействующей сначала на ось х, а потом на ось у, зная, что каждая из них равна алгебраической сумме проекций данных сил на соответствующую ось:
и определим проекции искомой равнодействующей сначала на ось х, а потом на ось у, зная, что каждая из них равна алгебраической сумме проекций данных сил на соответствующую ось:




3. Обе проекции получаются отрицательными. Значит, равнодействующая расположится так, как показано штриховым на рис. 15, б, и положение стержня ВС определится углом  .
.

4. Определим значение угла a из треугольника, образуемого и его проекциями (рис. 15, в):
 ,
, 
5. Стержень ВС необходимо установить под  к стержню АВ, и тогда он будет сжиматься силой, равной
к стержню АВ, и тогда он будет сжиматься силой, равной
 кН.
кН.
Описанное положение стержня показано на рис. 15, г.
Если же установить стержень, как показано на рисунке штриховой линией ВС, то стержень будет испытывать растяжение, равное той же силе R = 3,83 кН.
Задача 9. Определить равнодействующую пяти сил:
Р1 = 52 Н, Р2 = 70 Н, Р3 = 69 Н, Р4 = 77 Н, Р5 = 70 Н, действующих на точку А, как показано на рис. 16, а.

Решение – методом проекций.
1. Так как силы и направлены друг к другу под прямым углом, то и совместим с этими силами ось проекций. Тогда векторы , и будут образовывать с осями проекций углы, показанные на рис. 16, б.
2. Найдем проекцию равнодействующей на ось х:


3. Найдем проекцию равнодействующей на ось у:


4. Обе проекции искомой равнодействующей равны нулю, значит и сама равнодействующая также равна нулю.
Таким образом, данная система сил уравновешена. Иными словами, любую из пяти заданных сил можно рассматривать как уравновешивающую четыре остальных.
§ 4. Проекция силы на ось.
Проекция силы на две взаимно-перпендикулярные оси координат
Кроме рассмотренных выше графического и графоаналитического методов решения задач, в статике широко распространен аналитический метод их решения, или метод проекций.
Проекцией силы на ось (рис. 17) является отрезок оси, заключенный между проекциями на эту ось начала и конца вектора силы. Проекцию обычно обозначают той же буквой, что и силу, но с индексом. Например, Fx – проекция силы F на ось х.

Проекция силы на ось есть величина скалярная. Она может быть положительной, отрицательной или равной нулю в зависимости от величины угла a между направлением силы и положительным направлением оси. Из прямоугольного треугольника ABC следует, что Fx = F сos a, т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси.
Если угол a острый, то проекция положительна (рис. 17), если угол a – тупой, то проекция отрицательна (рис. 18, а):


Нетрудно убедиться, что проекция силы на ось будет равна нулю, если a = 90° или 270° (рис. 18, б), и равна модулю силы, если a = 0 или a = 180° (рис. 18, в).
Модуль и направление силы можно определить по ее проекциям на две взаимно перпендикулярные оси (рис. 18, в):

Из треугольника ABC, поскольку АС = Fx и ВС = Fy, следует, что модуль силы F равен
 (3)
(3)
Направление силы определяют косинусы углов (рис. 19):
 ;
;  . (4)
. (4)

Задача 10. В точке В кронштейна ABC (рис. 20, а) подвешен груз М весом 8 кН. Определить реакции стержней кронштейна, если углы кронштейна a = 110°, b = 30° и крепления в точках А, В и С шарнирные.

Решение – методом проекций при помощи уравнений равновесия.
1. Так как три силы , и , действующие на точку В (рис. 21), образуют уравновешенную систему, то алгебраические суммы проекций этих сил на каждую из двух осей координат равны нулю.

2. Выберем оси координат так, чтобы одна из осей совпадала с линией действия одной из неизвестных сил (рис. 21), и составим два уравнения равновесия:
 (1)
(1)
 (2)
(2)
 кН.
кН.

Задача 11. К шарниру В кронштейна ABC прикреплена веревка, перекинутая через блок, к другому концу которой прикреплен груз весом G = l,5 кН (рис. 22). Определить усилия в стержнях АВ и СВ кронштейна, если крепления в точках А и С шарнирные, a = 35° и b = 100°.

Решим задачу методом проекций.
1. Изобразив шарнир В вместе с действующими на него силами  и и расположив оси проекций, как показано на рис. 19, составим уравнения равновесия:
и и расположив оси проекций, как показано на рис. 19, составим уравнения равновесия:
 (1)
(1)
 (2)
(2)
2. Из уравнения (2)
 кН,
кН,
а из уравнения (1)

Итак, реакции стержней (их действия на шарнирный болт В) равны NA = 2,57 кН и NС = l,85 кН. Точно с такими же усилиями действует шарнирный болт на стержни. Стержень АВ растянут силой 2,57 кН, а стержень СВ сжат силой 1,85 кН.
Геометрический способ сложения сходящихся сил

Геометрический способ сложения сходящихся сил
Системой сходящихся сил называется система сил, линии действия которых пересекаются в одной точке (рис. 15,а). Если мы перенесем все силы такой системы но линиям их действия в общую точку пересечения этих
линии, то, согласно первому следствию из аксиом статики, действие системы на абсолютно твердое тело не изменится. Таким образом, любую систему сходящихся сил можно заменить эквивалентной системой сил, приложенных в одной точке.
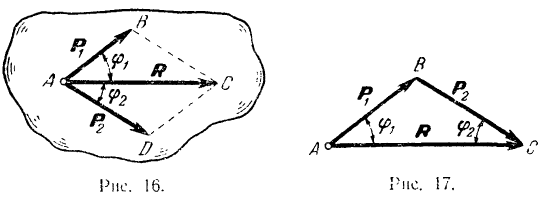
Задача о сложении двух сил, приложенных к одной точке, геометрически решается построением соответствующего параллелограмма сил (рис. 16) или силового треугольника (рис. 17), изображающего одну из половин параллелограмма.
Для построения силового треугольника из конца вектора одной силы  проводим вектор
проводим вектор  , изображающий вторую силу
, изображающий вторую силу  . Замыкающая сторона
. Замыкающая сторона  треугольника изображает но модулю и по направлению равнодействующую
треугольника изображает но модулю и по направлению равнодействующую  двух данных сходящихся сил.
двух данных сходящихся сил.
Последовательно применяя правило треугольника, можно найти равнодействующую любого числа сходящихся сил, например четырех сил  и
и  (рис. 15, а). Для этого из_произвольной точки
(рис. 15, а). Для этого из_произвольной точки  (рис. 15,6) отложим вектор
(рис. 15,6) отложим вектор  , изображающий в принятом масштабе силу , из конца его— вектор
, изображающий в принятом масштабе силу , из конца его— вектор  , из его конца — вектор
, из его конца — вектор  и т. д., помещая всякий раз начало следующего вектора в конце предыдущего, пока не исчерпаем все силы.
и т. д., помещая всякий раз начало следующего вектора в конце предыдущего, пока не исчерпаем все силы.
Полученный многоугольник  , стороны которого в выбранном масштабе равны модулям составляющих сил и одинаково с ними направлены, называется силовым многоугольником.
, стороны которого в выбранном масштабе равны модулям составляющих сил и одинаково с ними направлены, называется силовым многоугольником.
Очевидно, что равнодействующая  сил
сил  и
и  изображается (рис. 15,6) вектором
изображается (рис. 15,6) вектором  , равнодействующая
, равнодействующая  сил и
сил и  изображается вектором
изображается вектором  ) и замыкающая сторона
) и замыкающая сторона  силового многоугольника, направленная от начала вектора первой силы к концу вектора последней, изображает в выбранном масштабе равнодействующую данной системы сходящихся сил (т. е. сил и ) как по модулю, так и по направлению.
силового многоугольника, направленная от начала вектора первой силы к концу вектора последней, изображает в выбранном масштабе равнодействующую данной системы сходящихся сил (т. е. сил и ) как по модулю, так и по направлению.
Правило сложения сходящихся сил по способу многоугольника является общим правилом сложения любых векторов и называется их геометрическим сложением.
Геометрическая сумма всех сил любой системы называется главным вектором  этой системы
этой системы

Таким образом, можно сказать, что равнодействующая системы сходящихся сил проходит через общую точку пересечения линий действия этих сил и равна по модулю и направлению их главному вектору.
Геометрическая сумма векторов не зависит от перемены мест слагаемых и, следовательно, при изменении порядка сложения сил их главный векгор не изменяется.
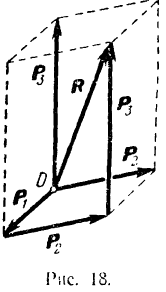
В частном случае трех сходящихся сил  и
и  не лежащих в одной плоскости (рис. 18), их равнодействующая изображается по модулю и направлению диагональю параллелепипеда, построенного на векторах составляющих сил (правило параллелепипеда).
не лежащих в одной плоскости (рис. 18), их равнодействующая изображается по модулю и направлению диагональю параллелепипеда, построенного на векторах составляющих сил (правило параллелепипеда).
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Техническая механика
Плоская система сходящихся сил
Геометрический способ определения равнодействующей плоской системы сходящихся сил
Система сил, линии действия которых лежат в одной плоскости и все пересекаются в одной точке, называется плоской системой сходящихся сил.
Теорема
Плоская система сходящихся сил в общем случае эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих.
Пусть дана плоская система трех сил F1 , F2 и F3 , линии действия которых сходятся в точке А (см. рисунок а) .
На основании следствия из аксиом III и IV перенесем эти силы вдоль линий их действия в точку А . Сложив первые две силы F1 и F2 по правилу параллелограмма, получим их равнодействующую R (см. рисунок а) :
R = F1 + F2 .
Пользуясь той же аксиомой параллелограмма, сложим равнодействующую R с силой F3 :
где FΣ – равнодействующая данной системы трех сил.
Аналогичные рассуждения можно провести для любого количества сходящихся сил, в результате чего получим:
FΣ = F1 + F2 + F3 +…+ Fn .
Сокращенно это равенство можно записать так:
FΣ = ΣFi , где i – все целые числа от единицы до n .
Очевидно, что построения, выполненные на рисунке a , можно заменить более простым, как показано на рисунке b . Многоугольник АВСD называют силовым многоугольником. Сторона AD , соединяющая начало первого с концом последнего вектора, называется замыкающей стороной.
Необходимо помнить, что стрелки векторов слагаемых сил образуют определенное направление обхода по контуру силового многоугольника, а замыкающая сторона, определяющая модуль и направление равнодействующей, имеет стрелку, направленную против обхода (см. рисунок b) .
Если определить равнодействующую из силового многоугольника с помощью геометрии и тригонометрии, то такой способ будет называться геометрическим.
Если сделать чертеж силового многоугольника в определенном масштабе, то равнодействующая определится простым измерением замыкающей стороны с последующим умножением на масштаб. Такой способ нахождения равнодействующей называется графическим.
Порядок сложения векторов при построении силового многоугольника на величину равнодействующей не влияет, так как векторная сумма от перемены мест слагаемых не меняется.
Геометрическое условие равновесия плоской системы сходящихся сил
При построении силового многоугольника возможен случай, когда конец последнего вектора совпадает с началом первого. В этом случае замыкающей стороны не будет, и такой силовой многоугольник называется замкнутым.
Очевидно, что равнодействующая FΣ системы сходящихся сил, образующих замкнутый силовой многоугольник, равна нулю, т. е. система сил находится в равновесии. Отсюда вытекает условие, при котором плоская система сходящихся сил будет находиться в равновесии. Это условие выражается равенством:
и формулируется так: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник был замкнут.
Условия равновесия, записанные в виде равенств, содержащих неизвестные величины, называются уравнениями равновесия.
Применяя геометрическое условие равновесия, удобно решать задачи, в которых на тело действуют три силы, так как в этом случае замкнутый силовой многоугольник представляет собой треугольник.
Решение большинства задач статики проводят в три этапа:
— выбирают тело, равновесие которого будет рассматриваться;
— отбрасывают связи, заменяя их реакциями, и устанавливают, какая система сил действует на тело;
— пользуясь условиями равновесия, находят неизвестные величины.
При решении задач статики следует строго соблюдать правило: размерности и единицы величин всех слагаемых и обеих частей равенства должны быть одинаковыми.
В сомнительных случаях целесообразно использовать это правило для проверки правильности хода решения задач, для чего следует подставить в слагаемые проверяемого равенства единицы всех входящих в них величин и, произведя возможные сокращения, сравнить полученные единицы правой и левой частей.
Пример решения задачи
В качестве примера решения задачи с использованием изложенных выше методов, определим натяжение веревки F и силу давления шара P на стену, если сила тяжести шара равна G .
Рассмотрим условие равновесия шара. Применив принцип освобождаемости, отбросим связи и заменим их реакциями. Реакция N гладкой стены перпендикулярна стене и проходит через центр шара (так как шар однородный, его геометрический центр совпадает с центром тяжести).
Реакция F веревки направлена вдоль линии натяжения веревки и тоже проходит через центр шара (согласно теореме о равновесии трех непараллельных сил). Применим к системе сил уравнение равновесия:
ΣFi = 0 , или G + N + R = 0.
Строим замкнутый силовой треугольник, начиная с изображения в произвольном масштабе вектора известной силы G (см. рисунок) . Направление обхода треугольника (т. е. направление стрелок) определяется направлением этой силы. Из построенного силового треугольника получим соотношения:
N = G tg α ; R = G/cos α
Искомая сила давления P шара на стену, согласно аксиоме взаимодействия, по модулю равна реакции N стены, но направлена в противоположную сторону.
Натяжение веревки F равно по модулю ее реакции R .
Эту же задачу можно решить, разложив силу тяжести шара G по реальным направлениям (направлениям реакций) на составляющие P (сила давления шара на стену) и F (натяжение веревки) , причем согласно аксиоме взаимодействия:
Из построенного параллелограмма (см. рисунок) легко определить искомые величины.
Такой метод решения задачи называют методом разложения силы.
Проекция силы на оси координат
В тех случаях, когда на тело действует более трех сил, а также когда неизвестны направления некоторых сил, удобнее при решении задач пользоваться не геометрическим, а аналитическим условием равновесия, которое основано на методе проекций сил на оси координат.
Проекцией силы на ось называют отрезок оси, заключенный между двумя перпендикулярами, опущенными на ось из начала и конца вектора силы.
На приведенном ниже рисунке видно, что проекции силы P на оси x и y можно определить при помощи тригонометрических функций:
Px = Pcos α, Py = Psin α .
Проекция силы на ось есть величина алгебраическая, которая может быть положительной или отрицательной, что устанавливается по направлению проекции — проекция, направленная в положительном направлении оси считается положительной, в противном случае — отрицательной.
Возможны два частных случая:
— если сила перпендикулярна оси, то ее проекция равна нулю (сила проецируется в точку) ;
— если сила параллельна оси, то она проецируется на ось в натуральную величину.
Зная проекции силы на координатные оси, можно определить ее величину (модуль) , используя теорему Пифагора, учитывая, что проекции являются катетами прямоугольного треугольника, а сама сила — гипотенузой.
Направляющий тангенс угла между вектором силы P и осью x можно определить из отношения:
tgα = Py/Px .
Отметим, что силу P можно представить, как равнодействующую двух составляющих сил Px и Py , параллельных осям координат, но эти составляющие не будут являться проекциями силы по определению, поскольку сила (в т. ч. и составляющая силы) есть величина векторная, а проекция — алгебраическая.
Аналитический способ определения равнодействующей плоской системы сил
Пусть дана плоская система сходящихся сил F1, F2, F3, F4. Fn .
Равнодействующая этой системы FΣ = ΣFi .
В плоскости действия данной системы сил выберем ось координат и спроецируем данные силы и их равнодействующую на эту ось. Из математики известно свойство проекции векторной суммы, на основании которого можно утверждать, что проекция равнодействующей на ось равна алгебраической сумме проекций составляющих сил на ту же ось, т. е. FΣx = ΣFix .
Правую часть этого равенства можно представить упрощенно: FΣx = ΣX .
Для того чтобы определить равнодействующую любой плоской системы сходящихся сил, спроецируем их на оси координат x и y , алгебраически сложим проекции всех сил и найдем таким образом проекции равнодействующей:
Зная проекции, определим модуль и направление равнодействующей:
Модуль равнодействующей:
FΣ = √(FΣx 2 + FΣy 2 ) (здесь и далее √ — знак корня);
Направляющий тангенс угла между вектором FΣ и осью x :
Линия действия равнодействующей проходит через точку пересечения линий действия составляющих сил.
Аналитические условия равновесия плоской системы сходящихся сил
Если данная плоская система сходящихся сил находится в равновесии, то равнодействующая такой системы, а значит и проекции равнодействующей на оси координат равны нулю.
Математически это выражение можно записать так:
Учитывая, что FΣx = ΣX; FΣy = ΣY , получаем равенства, выражающие аналитические условия равновесия плоской системы сходящихся сил:
Формулируется это условие следующим образом: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраическая сумма проекций этих сил на каждую из двух координатных осей равнялась нулю.
С помощью уравнений равновесия можно определить два неизвестных элемента данной системы сил, например модуль и направление одной силы или модули двух сил, направления которых известны и т. п.
Выведенные условия равновесия справедливы для любой системы координат, но для упрощения расчетов рекомендуется оси координат по возможности выбирать перпендикулярными неизвестным силам, чтобы каждое уравнение равновесия содержало одно неизвестное.
Когда направление искомой силы неизвестно, ее можно разложить на две составляющие по заданным направлениям, обычно по направлениям координатных осей; по найденным двум составляющим легко определяется неизвестная сила.
Если при решении задач аналитическим способом искомая реакция получается отрицательной, то это означает, что действительное ее направление противоположно направлению, принятому при расчетах.
http://lfirmal.com/geometricheskij-sposob-slozheniya-shodyaschihsya-sil/
http://k-a-t.ru/tex_mex/11-statika_plosk_sily/
Формула модуля равнодействующей силы
Сила является вектором, то есть обладает как модулем (величиной) так и направлением. Однако чаще всего приходится иметь дело с телами, на которые действуют не одна, а несколько сил. Тогда рассматривают сумму всех сил, оказывающих действие на тело, такую сумму сил называют равнодействующей силой ( ):
):
![[overline{F}={overline{F}}_1+{overline{F}}_2+dots +{overline{F}}_N qquad(1)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-41939075a745b3895c99cfcf951eed98_l3.png)
Равнодействующая сила – это гипотетический (искусственный) параметр, который вводят для того, чтобы удобнее было производить расчеты. Следует учитывать, что равнодействующая сила (как и любая сила) – это векторная величина, имеющая модуль и направление.
Модуль равнодействующей двух сил
Допустим, тело находится под воздействием двух сил. Они направлены по одной прямой (рис.1).
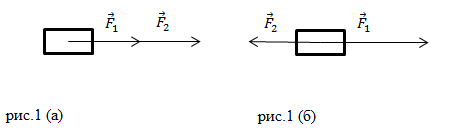
Если силы имеют одинаковые направления (рис.1 (а)), то модуль равнодействующей вычисляется как:
![[F=F_1+F_2 qquad(2)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-08b3c6736e75623009a94c456c2d36d0_l3.png)
На рис 1(б) силы направлены по одной прямой, но имеют противоположные направления. Формулой для вычисления модуля равнодействующей в таком случае будет выражение:
![[F=F_1-F_2 qquad(2)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-31a74b7b9015c26e6120f2fa1e0b5076_l3.png)
Рассмотрим случаи, когда две силы, действующие на тело, направлены под углом друг другу (рис.2).
В случае, который представлен на рис.2 (а) силы  и
и  направлены под углом 900 по отношению друг к другу. Модуль равнодействующей силы можно найти по теореме Пифагора:
направлены под углом 900 по отношению друг к другу. Модуль равнодействующей силы можно найти по теореме Пифагора:
![[F=sqrt{F^2_1+F^2_2} qquad(3)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-4f8b2b5eadf219c730509f8127c93053_l3.png)
Если угол между векторами сил и отличен от прямого угла, то модуль равнодействующей силы находят по теореме косинусов:
![[F=sqrt{F^2_1+F^2_2-2F_1F_2{cos alpha } } qquad(4)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-6a98dd54f10d2cf0b55efeb685202731_l3.png)
где  – угол между векторами и
– угол между векторами и 
Модуль равнодействующей нескольких сил
Пусть на тело действуют силы:  , тогда равнодействующая этих сил () находится в соответствии с формулой (1). Для того чтобы вычислить модуль равнодействующей нескольких сил приложенных к телу выполняют следующую последовательность действий:
, тогда равнодействующая этих сил () находится в соответствии с формулой (1). Для того чтобы вычислить модуль равнодействующей нескольких сил приложенных к телу выполняют следующую последовательность действий:
- Вводят декартову систему координат, выбирают направления осей (X,Y).
- Записывают проекции сил, действующих на тело на избранные оси:
![[left{ begin{array}{c} X: F_{1x},F_{2x},dots , F_{Nx}; \ Y: F_{1y},F_{2y},dots , F_{Ny} end{array} right. qquad(5)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-bd9ae3e42163fa4c8481be5055b0d2b3_l3.png)
![[left{ begin{array}{c} X: F_x=F_{1x}+F_{2x}+dots ,+ F_{Nx}; \ Y: F_y=F_{1y}+F_{2y}+dots , {+F}_{Ny} end{array} right. qquad(6)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-d38e23b80051f7a1df9acf90297be6b7_l3.png)
![[F=sqrt{F^2_x+F^2_y} qquad(7)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-b461bb1b4038c855e811c7cec16a8e7e_l3.png)
Примеры решения задач по теме «Модуль равнодействующей силы»
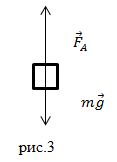
 Силы направлены вдоль одной прямой в противоположные стороны. За положительное направление примем направление силы Архимеда (
Силы направлены вдоль одной прямой в противоположные стороны. За положительное направление примем направление силы Архимеда ( ) (рис.3), тогда модуль подъемной силы равен:
) (рис.3), тогда модуль подъемной силы равен:
![[F_p=F_A-mg qquad(1.2)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-40642961245c3dc4327c71fd4e6812da_l3.png)
Величину силы Архимеда найдем как:
![[F_A={rho }_{sh}Vg={rho }_{sh}gfrac{m}{rho } qquad(1.3)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-ca341baae3a89b504ca6946f64184687_l3.png)
где  . Получаем, что модуль подъемной силы равен:
. Получаем, что модуль подъемной силы равен:
![[F_p=mgfrac{{rho }_{sh}}{rho } -mg=mgleft(frac{{rho }_{sh}}{rho }-1right)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-9393c739ff89e69f9292527136f6f26f_l3.png)
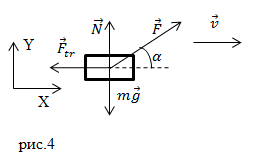
Силой взаимодействия тела и поверхности, по которой оно движется, будем считать равнодействующую  и
и  :
:
![[{overline{F}}_v={overline{F}}_{tr}+overline{N} qquad(2.1)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-e00abfc31e966518e35c32af260d0809_l3.png)
Сила трения и сила реакции опоры направлены под углом  по отношению друг к другу, следовательно, модуль силы взаимодействия найдем как:
по отношению друг к другу, следовательно, модуль силы взаимодействия найдем как:
Модуль силы, скорости, импульса. Что это?!
Абсолютная величина, известная так же, как модуль, это всегда некое неотрицательное число, чье определение всегда зависит от типа числа. Символически модуль обозначается как: | x |.
Сила и модуль силы
В процессе изучения физики приходится сталкиваться с различными явлениями, рассчитывать скорость, силу и многие другие параметры. Не менее важно понять какими методами, и в каких единицах делаются расчеты по характеристикам этих явлений. Одна из физических величин это сила. Сила представляет собой величину, которая способна показать меру воздействия на тело посредством другого тела или со стороны полей. Взаимодействие образуется за счет тех полей, которые создаются самими телами в случае контакта. Всего различают четыре вида взаимодействия: слабое, сильное, гравитационное, электромагнитное. Сила обозначается буквой F от латинского слова fortis, что в переводе означает сильный.
Что такое модуль силы?
Сила является векторной величиной, это значит, что она обладает, так как направлением, так и модулем. Не так часто встречается случай, когда на тело воздействует одна единственная величина, чаще всего их несколько. В таком случае речь о равнодействующей силы, которая формируется за счет суммирования всех сил, влияющие на тело одновременно. Стоит отметить, что параметр равнодействующая сила является искусственным и создан только для удобства проведения расчетов.
Но что же это модуль силы? Модуль является абсолютной величиной. Это такая величина, которая отражается числом с плюсом во всех случаях. Другими словами характеристики какого-то процесса или явления выражены конкретными числами. Каждая сила характеризуется направлением и величиной, эта величина и есть модуль, вот что это модуль силы.
Модуль равнодействующих двух сил определяется по формулам:
- F=F1 + F2 (в случае сил с одинаковым направлением)
- F=F1 — F2 (силы с разным направлением)
Для модуля равнодействующих нескольких сил все намного сложнее. Для начала надо вводить систему координат, записать и высчитать проекции сил, потом использовать теорему Пифагоры.
Исаак Ньютон внес серьезный вклад в работу над различными видами сил. В связи с этим в качестве единицы измерения силы применяется Н (Ньютон).
Что это модуль скорости?
Каждое тело в процессе перемещения развивает энную скорость, которая характеризуется двумя параметрами: направление и модуль. Что же это модуль скорости? Это число, обозначающее, насколько быстро перемещается тело. Сама скорость является вектором. У нее есть все свойства вектора перемещения, так как выражается посредством него и обладает всеми свойствами данного вектора.
Для определения модуля скорости необходимо учитывать закон движения со всеми своими правилами. Вычисление модуля скорости может осуществляться посредством графика движения. Если недостаточно понятно, что это модуль скорости тела можно использовать одно из понятий: скалярная величина и алгебраическая скорость. Скорость как вектор это величина с направлением и численным значением, при этих условиях модуль скорости тела это не что иное, как длина этого вектора.
Чаще всего речь о прямолинейном движении в рамках координат (x;t). В таком случае для определения данного параметра подойдет формула:
v = S/t = (x — x0)/t.
Это значит, что необходимо нужно отнять начальную координату от конечной координаты. Полученный результат нужно разделить на то время, за которое имело место изменение координаты.
Пример определения модуля скорости одного тела относительно другого на основе задачи: два тела перемещаются со скоростью 8 и 6 м/с. Направление их движения перпендикулярное друг другу. Поэтапное решение осуществляется таким образом:
- Вычисляется скорость v21 на базе закона сложения скоростей v2 = v21 + v1, а значит v21 = v2 – v1.
- Определяется модуль скорости тела согласно теореме Пифагора.
Модуль импульса и модуль оси
Импульс представляет собой векторную величину, чье направление идентично направлению вектора скорости. Он может поменяться только в том случае, если произойдет изменение скорости под воздействием какой-то силы. Но что это модуль импульса и как он рассчитывается? Модуль импульса определяется согласно произведению массы тела на скорость. Его можно легко вычислить, если есть данные по скорости и по массе.
Что это модуль оси? Разъяснение данного понятия, может быть сделана на основе определения понятия ось. Ось представляет собой прямую с заданным направлением. В каком-то роде можно сказать, что это нечто иное, как вектор с величиной модуля, которая тянется к бесконечности. Это и есть модуль оси. Для обозначения оси можно использовать любую букву: t, Z, Y, X и т.д. На ней определяется точка О, известная как начало отсчета. Все расстояния до других точек определяются относительно нее. Для того чтобы сделать проекцию точки на ось, нужно провести перпендикулярную прямую через эту точку на саму ось. В таком случае проекция этой точки, сама точка.
Как найти модуль силы действующей на тело
На тело могут оказывать действие не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы.
Формула равнодействующей всех сил
Пусть на тело воздействуют в один и тот же момент времени N сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Сила является векторной величиной. Следовательно, силы, действующие на тело, нужно складывать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline $) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
Формула (1) — это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена также как вектор ускорения тела.
Складывают векторы, используя правило треугольника (рис.1)
правило параллелограмма (рис.2).
или многоугольника (рис.3):
Второй закон Ньютона и формула модуля равнодействующей
Основной закон динамики поступательного движения в механике можно считать формулой для нахождения модуля равнодействующей силы, приложенной к телу и вызывающей ускорение этого тела:
$overline =0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета тело скорость движения тела.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач с решением
Задание. К материальной точке приложены силы, направленные под углом $alpha =60<>^circ $ друг к другу (рис.4). Чему равен модуль равнодействующей этих сил, если $F_1=40 $Н; $F_2=20 $Н?
Решение. Силы на рис. 1 сложим, используя правило параллелограмма. Длину равнодействующей силы $overline $ найдем, применяя теорему косинусов:
Вычислим модуль равнодействующей силы:
[F=sqrt<<40>^2+<20>^2+2cdot 40cdot 20<cos (60<>^circ ) >>approx 52,92 left(Н
ight).]
Ответ. $F=52,92$ Н
Задание. Как изменяется модуль равнодействующей силы со временем, если материальная точка массы $m$ перемещается в соответствии с законом: $s=A<cos (omega t)(м) >$, где $s$ — путь пройденный точкой; $A=const;; omega =const?$ Чему равна максимальная величина этой силы?
Решение. По второму закону Ньютона равнодействующая сил, действующих на материальную точку равна:
Следовательно, модуль силы можно найти как:
Ускорение точки будем искать, используя связь между ним и перемещением точки:
Первая производная от $s$ по времени равна:
Подставим полученный в (2.5) результат, в формулу модуля для равнодействующей силы (2.2) запишем как:
Так как косинус может быть меньше или равен единицы, то максимальное значение модуля силы, действующей на точку, составит:
Скорость автомобиля массой 1000 кг, движущегося вдоль оси Ox, изменяется со временем в соответствии с графиком (см. рисунок).
Систему отсчета считать инерциальной. Чему равна равнодействующая всех сил, действующих на автомобиль? (Ответ дайте в ньютонах.)
Согласно второму закону Ньютона, равнодействующая всех сил, действующих на тело, связана с ускорением и массой тела соотношением Из графика определим ускорение, которое остается постоянным на протяжении всего интервала времени:
Таким образом, равнодействующая всех сил равна
а если бы ускорение было отрицательно, то и равнодействующая была бы отрицательной?
Скорость, сила, ускорение — все это векторные величины. Правильно говорить не про их знак, а про знак проекции этих векторов на некоторую ось. Если проекция скорости уменьшается, то ускорение направлено против оси, а значит, так же направлена и равнодействующая. Следовательно, проекции этих величин отрицательны. По графику модуля скорости о знаке проекций судить нельзя. Действительно, имея только график, приведенный в условии, мы не можем сказать, ускоряется тело вдоль оси или против. Проекция ускорения может быть тут как положительной, так и отрицательной.
«Систему отсчета считать инерциальной.» Возможно ошибаюсь, ребят, но, вроде, в ИСО равнодействующая всех сил равна нулю.
ИСО — это система отсчета, в которой тело, на которое не действует никаких внешних сил, двигается равномерно и прямолинейно или покоится.
Равнодействующая сил, конечно, же может и отличаться от нуля, это, согласно второму закону Ньютона, приведет к появлению ускорения.
т.е. в инерциальной системе отсчёта нет силы трения?
и ещё: вы говорите, что тело в ИСО движется равномерно, а в условии задачи дано равноускоренное движение. так бывает?
Я не так говорю, не вырывайте слова и контекста. Я даю определение ИСО: это система отсчета, в которой тело, НА КОТОРОЕ НЕ ДЕЙСТВУЮТ ВНЕШНИЕ СИЛЫ, двигается равномерно и прямолинейно, либо покоится. А вот если СИЛЫ ДЕЙСТВУЮТ, то это приводит к появлению ускорения, о чем нам и говорит второй закон Ньютона.
Наличие силы трения определяется свойством поверхностей, а не выбором системы отсчета. И в данной задаче, она, конечно, присутствует и направлена по скорости движения автомобиля, иначе бы он просто не мог бы разгоняться. Но чему она равна, мы найти из данного графика не можем, так как есть и другие силы, например, сила сопротивления воздуха. Что мы может тут определить, так это равнодействующую всех сил. Именно ей определяется ускорение.
Пыталась найти ускорение как тангенс угла наклона касательной, то есть производную от v по t. Тут угол — 45 град, тангенс = 1, ускорение, стало быть, так же 1 м/с^2.
Подскажите пожалуйста, где в моих рассуждениях ошибка?
Ошибка в том, что тангенс надо считать, учитывая масштаб графика по осям. То есть Вы должны определить катеты прямоугольного треугольника, используя числа на осях, а потом поделить один катет на другой.
Кстати, простое доказательство, почему Ваше решение не верно. Сожмем картинку с графиком по вертикали в два раза. Угол на рисунке изменится, а ускорение, конечно, же останется прежним.
а почему считают ускорение до 8с. а не до 18, если найдем ускорение по всей длине то получается 10-0/18=1,8 и получается другой ответ!
Делить нужно на 20. Масштаб по горизонтальной оси: в одной клеточке 4 с
На тело, находящееся на горизонтальной плоскости, действуют три горизонтальные силы (см. рисунок, вид сверху). Каков модуль равнодействующей этих сил, если (Ответ дайте в ньютонах и округлите до десятых.)
На рисунке обозначена равнодействующая векторов и
Поскольку модуль вектора силы равен 1 Н, заключаем, что масштаб рисунка такой, что сторона одного квадрата сетки соответствует модулю силы 1 Н. Таким образом, модуль равнодействующей равен по теореме Пифагора
А как определили эту равнодействующую трёх сил, я понять не могу?!
Чтобы найти равнодействующую, необходимо сложить вектора всех сил (например, по правилу треугольника или параллелограмма складываем вектора по два).
Если сложить вектор и вектор , получится вектор, направленный вверх длиной в одну клеточку. Теперь осталось прибавить к нему вектор . В результате и получается то, что показано красной стрелкой.
векторы F1 и F3 никак нельзя сложить правилом треугольника! дак как эту задачц решить тут решения совсем непонятные!
Когда Вы складываете параллельные вектора, у Вас просто получается «вырожденный треугольник». Правила все те же, к концу первого вектора прикладываем начало второго. Сумма векторов — это вектор, который начинается в начале первого и заканчивается в конце второго. То есть в данном случае у Вас получится вектор, направленный вверх и длиной в одну клеточку.
Две силы 3 H и 4 H приложены к одной точке тела, угол между векторами сил равен 90°. Чему равен модуль равнодействующей сил? (Ответ дайте в ньютонах.)
Силы и их равнодействующая указаны на рисунке. По теореме Пифагора, модуль равнодействующей сил равен
Под действием одной силы F1 тело движется с ускорением 4 м/с 2 . Под действием другой силы F2, направленной противоположно силе F1, ускорение тела равно 3 м/с 2 . С каким ускорением тело будет двигаться при одновременном действии сил F1 и F2? (Ответ дайте в метрах в секундах в квадрате.)
Согласно второму закону Ньютона, ускорение тела пропорционально равнодействующей всех сил, действующих на него: Силы и по условию, направлены противоположно, поэтому при их одновременном действии тело будет двигаться с ускорением
Тело подвешено на двух нитях и находится в равновесии. Угол между нитями равен 90°, а силы натяжения нитей равны 3 H и 4 H. Чему равна сила тяжести, действующая на тело? (Ответ дайте в ньютонах.)
Всего на тело действует три силы: сила тяжести и силы натяжения двух нитей. Поскольку тело находится в равновесии, равнодействующая всех трех сил должна равняться нулю, а значит, модуль силы тяжести равен
в условии написано,что нужно найти вес тела.
а в решении модуль силы тяжести.
Как вес может измеряться в Ньютонах.
В условии ошибка(
Вы путаете понятия массы и веса. Весом тела называется сила (а потому вес измеряется в Ньютонах), с которой тело давит на опору или растягивает подвес. Как следует из определения, эта сила приложена даже не к телу, а к опоре. Невесомость — это состояние, когда у тела пропадает не масса, а вес, то есть тело перестает давить на другие тела.
Согласен, в решении была допущена некоторая вольность в определениях, сейчас она поправлена.
Понятие «вес тела» введен в учебную физику крайне неудачно. Если в бытовом понятии вес обозначает массу то в школьной физике, как вы правильно заметили весом тела называется сила (а потому вес измеряется в Ньютонах), с которой тело давит на опору или растягивает подвес. Заметим, что речь идет об одной опоре и об одной нити. Если опор или нитей несколько несколько, понятие веса исчезает.
Привожу пример. Пусть в жидкости на нити подвешено тело. Оно растягивает нить и давит на жидкость с силой равной минус сила Архимеда. Почему же, говоря о весе тела в жидкости, мы не складываем эти силы, как Вы делаете в своем решении?
Я зарегистрировался на Вашем сайте, но не заметил, что же изменилось в нашем общении. Прошу извинить мою тупость, но я, будучи человеком старым, недостаточно свободно ориентируюсь на сайте.
Действительно, понятие веса тела весьма расплывчато, когда тело имеет несколько опор. Обычно вес в этом случае определяют как сумму взаимодействий со всеми опорами. При этом воздействие на газообразные и жидкие среды, как правило, исключается. Это как раз подпадает под описанный Вами пример, с подвешенным в воде грузиком.
Здесь сразу вспоминается детская задачка: «Что весит больше: килограмм пуха или килограмм свинца?» Если решать эту задачу по-честному, то нужно несомненно учитывать силу Архимеда. А под весом скорее всего мы будем понимать то, что нам будут показывать весы, то есть силу, с которой пух и свинец давят, скажем, на чашку весов. То есть здесь сила взаимодействие с воздухом как бы из понятия веса исключается.
С другой стороны, если считать, что мы откачали весь воздух и кладем на весы тело, к которому привязана веревочка. То сила тяжести будет уравновешиваться суммой силы реакции опоры и силой натяжения нити. Если мы понимаем вес как силу действия на опоры, препятствующие падению, то вес тут будет равен этой сумме силы растяжения нити и силы давления на чашку весов, то есть совпадать по величине с силой тяжести. Опять возникает вопрос: чем нитка лучше или хуже силы Архимеда?
В целом тут можно договориться до того, что понятие веса имеет смысл только в пустом пространстве, где есть только одна опора и тело. Как тут быть, это вопрос терминологии, которая, к сожалению, у каждого здесь своя, поскольку не столь уж это и важный вопрос И если силой Архимеда в воздухе во всех обычных случаях можно пренебречь, а значит, на величину веса она особо повлиять не может, то для тела в жидкости это уже критично.
Если уж быть совсем честным, то разделение сил на виды весьма условно. Представим себе ящик, который тащат по горизонтальной поверхности. Обычно говорят, что на ящик действуют две силы со стороны поверхности: сила реакции опоры, направленная вертикально, и сила трения, направленная горизонтально. Но ведь это две силы, действующие между одними и теми же телами, почему же мы просто не рисуем одну силу, являющуюся их векторной суммой (так, кстати, иногда и делается). Тут, это, наверное, вопрос удобства
Так что я немного в замешательстве, что делать с данной конкретной задачей. Проще всего, наверное, переформулировать ее и задавать вопрос про величину силы тяжести.
Не переживайте, все в порядке. При регистрации Вы должны были указать e-mail. Если теперь зайти на сайт под своим аккаунтом, то при попытке оставить комментарий в окне «Ваш e-mail» должен сразу появляться тот самый адрес. После этого система будет автоматически подписывать Ваши сообщения.
Задание 2. На рисунке показаны силы (в заданном масштабе), действующие на материальную точку. Сторона клетки соответствует 1 Н. Определите модуль равнодействующей приложенных к телу сил.

Сначала сложим силы F1 и F3. Так как они противоположно направлены, то получим результирующую силу, направленную как F3, но на одну клетку меньше (см. синяя линия на рисунке ниже).

Складывая полученную силу с силой F2, имеем результирующую силу, направление которой показано красной линией на рисунке. Модуль этой силы найдем по теореме Пифагора из прямоугольного треугольника с катетами 4 и 3:
 Онлайн калькуляторы
Онлайн калькуляторы
На нашем сайте собрано более 100 бесплатных онлайн калькуляторов по математике, геометрии и физике.
 Справочник
Справочник
Основные формулы, таблицы и теоремы для учащихся. Все что нужно, чтобы сделать домашнее задание!
Заказать решение
Не можете решить контрольную?! Мы поможем! Более 20 000 авторов выполнят вашу работу от 100 руб!

Сила является вектором, то есть обладает как модулем (величиной) так и направлением. Однако чаще всего приходится иметь дело с телами, на которые действуют не одна, а несколько сил. Тогда рассматривают сумму всех сил, оказывающих действие на тело, такую сумму сил называют равнодействующей силой ():
![]()
Равнодействующая сила – это гипотетический (искусственный) параметр, который вводят для того, чтобы удобнее было производить расчеты. Следует учитывать, что равнодействующая сила (как и любая сила) – это векторная величина, имеющая модуль и направление.
Модуль равнодействующей двух сил
Допустим, тело находится под воздействием двух сил. Они направлены по одной прямой (рис.1).

Рассмотрим случаи, когда две силы, действующие на тело, направлены под углом друг другу (рис.2).

В случае, который представлен на рис.2 (а) силы и направлены под углом 900 по отношению друг к другу. Модуль равнодействующей силы можно найти по теореме Пифагора:
-

- Если угол между векторами сил и отличен от прямого угла, то модуль равнодействующей силы находят по теореме косинусов:
- где – угол между векторами и
Модуль равнодействующей нескольких сил
Пусть на тело действуют силы: , тогда равнодействующая этих сил () находится в соответствии с формулой (1). Для того чтобы вычислить модуль равнодействующей нескольких сил приложенных к телу выполняют следующую последовательность действий:
- Вводят декартову систему координат, выбирают направления осей (X,Y).
- Записывают проекции сил, действующих на тело на избранные оси:
- Вычисляют проекции равнодействующей силы на оси X и Y, при этом складывают проекции сил по осям. Необходимо отметить, что суммирование проводят алгебраическое, то есть учитывают знаки проекций:
- И в заключении модуль равнодействующей силы находят, применяя теорему Пифагора:
Примеры решения задач по теме «Модуль равнодействующей силы»
Понравился сайт? Расскажи друзьям!
Источник: http://ru.solverbook.com/spravochnik/formuly-po-fizike/formula-modulya-ravnodejstvuyushhej-sily/
Определение равнодействующей системы сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом.
Выберем систему координат, определим пропорции всех заданных векторов на эти оси (рис. 3.4, а).
Складываем проекции всех векторов на оси х и у (рис. 3.4, б).

Модуль (величину) равнодействующей можно найти по известным проекциям:

Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующей с осями координат (рис. 3.5).
- Условия равновесия плоской системы сходящихся сил в аналитической форме
-

Исходя из того, что равнодействующая равна нулю, получим:
- Условия равновесия в аналитической форме можно сформулировать следующим образом:
- Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
- Система уравнений равновесия плоской сходящейся системы сил:

В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
Примеры решения задач
Пример 1. Определить величины и знаки проекций представленных на рис. 3.6 сил.

Решение
Пример 2. Определить величину и направление равнодействующей плоской системы сходящихся сил аналитическим способом.
Решение
1.

Определяем проекции всех сил системы на Ох (рис. 3.7, а):
- Сложив алгебраически проекции, получим проекцию равнодействующей на ось Ох.


- F∑x = 8,66 – 20 + 10,6 = — 0,735 кН
- Знак говорит о том, что равнодействующая направлен влево.

2.

Определяем проекции всех сил на ось Оу значения проекций, получим величину проекции Оу.
Сложив алгебраически значения проекций, получим величину проекции равнодействующей на ось Оу.
Знак проекции соответствует направлению вниз. Следовательно, равнодействующая направлена влево и вниз (рис. 3.7б).
- 3. Определяем модуль равнодействующей по величинам проекций:
- 4. Определяем значение угла равнодействующей с осью Ох:
- и значение угла с осью Оу:
Пример 3. Система трех сил находится в равновесии. Известны проекции двух сил системы на взаимно перпендикулярные оси Ох и )у:
- Flx = 10 кН; F2x = 5 кН;
- F1y = — 2 кН; F2y = 6 кН.
- Определить, чему равна и как направлена третья сила системы.
- Решение
- 1. Из уравнений равновесия системы определяем:
- 2. По полученным величинам проекций определяем модуль силы:
Направление вектора силы относительно оси Ох (рис. 3.8):
Угол с осью Ох будет равен
Пример 4. Определить величину и направление реакций связей для схемы, приведенной на рисунке, а под действием груза G = 30 кН. Проверить правильность определения реакций.
Решение
1. В задаче рассматривается равновесие тела, опирающегося на плоскость и подвешенного на нити. Заменим тело точкой , совпадающей с центром тяжести.
2. Приложим к точке активную силу, которой является собственный вес тела G. Направим ее вниз (рис. б).
3. Мысленно отбросим связи — плоскость и нить. Заменим их действие на точку 0 реакциями связей. Реакция плоскости (обозначим ее R) проходит по нормали к плоскости в точке А, а реакция или усилие в нити (обозначим ее S) — по нити от точки. Обе реакции и вес тела или линии их действия должны пересекаться в точке 0.
Изобразим действующие силы в виде системы трех сходящихся сил на отдельном чертеже (рис. в).
4. Выберем положение системы координат. Начало координат совмещаем с точкой 0. Ось х совмещаем с направлением линии действия реакции R, а ось у направим перпендикулярно оси х (рис. г).
Определим углы между осями координат и реакциями R и S. Обычно рис. б и в не выполняют отдельно, а сразу от рис. а переходят к рис. г.
Можно было ось у совместить с усилием S, и ось х направить по углом 90°, тогда решение было бы другим.
- 5. Составим сумму проекций всех сил на оси координат:
- Решим систему уравнений. Из второго уравнения находим
- Из первого уравнения находим
6.Проверим решение, для чего расположим оси координат, как показано на рис. д. Составим уравнения равновесия для вновь принятых осей:
- Решим систему уравнений способом подстановки.
- Из первого уравнения найдем R:
- Подставим это выражение во второе уравнение:
Очевидно, что при расположении осей, как показано на рис. д, вычисления оказались более сложными.
Ответ: R = 11,84 кН; S = 22,21 кН.
Пример 5. Определить усилия в нити и стержне кронштейна, показанного на рис. а, если G = 20 кН.
Решение
1. Рассмотрим равновесие точки А (или узла А), в которой сходятся все стержни и нити.
2. Активной силой является вес груза G, направленный вниз (рис. б).
3. Отбросим связи: стержень и нить. Усилие в нити обозначим Sx и направим от точки А, так как нить может испытывать только растяжение. Усилие в стержне обозначим S2 и тоже направим от точки А, предполагая что стержень АС растянут (рис. б).
Выполним на отдельном чертеже схему действия сил в точке А (рис. в).
4. Выберем положение системы координат. Начало координат совмещаем с точкой А (рис. г). Ось х совмещаем с линией действия усилия S, а ось у располагаем перпендикулярно оси х. Укажем углы между осями координат и усилиями S1.и S2.
5. Составим уравнения равновесия.
- Из второго уравнения находим
- Из первого уравнения находим
- Знак «минус» перед S2 свидетельствует о том, что стержень АС не растянут, как предполагалось, а сжат.
6. Проверку решения предлагаем выполнить самостоятельно, расположив оси координат так, как показано на рис. д.
Ответ: S1 = 15,56 кН, S2 = — 29,24 кН (при принятом на чертеже направлении усилий).
Величина усилий зависит от углов наклона стержня и нити. Например, если на рис. а угол 70° заменить на 60°, сохранив угол 30°, то усилия будут равны: S1= 20 кН, S2 = — 34,64 кН. А при угле 50° S1 = 29,26 кН, S2 = — 44,8 кН. Оба усилия растут и становятся больше веса груза.
Пример 6. Как изменятся усилия в стержне и нити, если груз будет перекинут через блок, как показано на рис. а?
Остальные данные — в примере 5.
Решение
1. Рассматриваемой тонкой остается точка А.
2. Активная сила (вес груза G) действует на точку горизонтально слева направо, так как груз перекинут через блок.
3. Усилия S1 и S2 прикладываем к точке А, как в примере 2.
4. Выбираем систему координат, как показано на рис. б.
- 5. Составляем и решаем уравнения равновесия:
- Из первого уравнения находим
- Из второго уравнения находим
Ответ: S1 = 26,94 кН; S2 = — 10,64 кН при принятом направлении усилий на чертеже. Усилие S1 увеличилось, S2 — уменьшилось, а знаки не изменились.
Пример 7. Определить усилия в стержнях (рис. а). Массой стержней пренебречь.
Решение
В соответствии с последовательностью действий, будем рассматривать равновесие узла А к которому приложены заданные нагрузки (Р, 2Р, 3Р) и искомые реакции стержней АВ и АС.
Освободим узел А от связей, заменим их действие искомыми реакциями NАС, NAB(рис. в). Получили плоскую систему сходящихся сил.
Выбираем систему координат (рис. г).
- Сила NAB перпендикулярна оси v, сила NАС — оси и; поэтому в каждое уравнение равновесия войдет лишь одна неизвестная сила:
- Силы NAB и NАС получились положительными; это значит, что предполагаемые направления сил совпадают с действительными.
На рис. д показаны силы, действующие на узел (реакции стержней), и силы, действующие на стержни (усилия в стержнях или реакции узла).
Решим тот же пример графическим методом.
Полученная система сил (см. рис. в) находится в равновесии, и, следовательно, силовой многоугольник, построенный для этой системы сил, должен быть замкнутым.
Строим силовой многоугольник. Выбираем масштаб (рис. е). От точки О (рис. ж) в выбранном масштабе откладываем сначала силу Р, затем от конца вектора Р — силу 2Р, после чего от конца вектора 2Р — силу ЗР.
Масштаб следует выбрать достаточно крупный, с тем чтобы при измерении отрезков (векторов), изображающих искомые силы, можно было получить их значения без большой погрешности. Через точку b проводим линию, параллельную стержню АС, и через точку О — линию, параллельную стержню АВ.
Отрезки ОС и CB представляют собой искомые усилия. Направления заданных сил известны; стрелки, изображающие направления искомых сил, ставим таким образом, чтобы в векторном многоугольнике было единое направление обхода — в данном случае против часовой стрелки.
Измерив отрезки к и Ос в соответствии с выбранным масштабом, находим абсолютные величины реакций; NAcza,2P Nab~4,2P.
Решение примера выполнено двумя способами, которые (в пределах точности построений) дали совпадающие результаты. Очевидно, здесь никакой дополнительной проверки решения не требуется.
Пример 8. Определить предельное значение угла а, при котором груз А (рис. а) будет находиться в покое. Плоскость ВС считать абсолютно гладкой.
Решение
Силы, действующие на груз А, представляют собой плоскую систему сходящихся сил. NBC — реакция наклонной плоскости.
Если груз А находится в покое, то ∑Pto = 0, т.е.
- Контрольные вопросы и задания
1. Запишите выражение для расчета проекции силы F на ось Оу (рис. 3.9).
2. Определите сумму проекций сил системы на ось Ох (рис. 3.10).
4. Определите величину силы по известным проекциям:
Fx = 3 кН; Fy = 4 кН.
5. Груз находится в равновесии (рис. 3.11). Какая система уравнений равновесия для шарнира А записана верно?
Указания.
1. При ответе на вопросы 1 и 2 необходимо знать, что в выражение для величины проекции силы на ось подставляется угол между вектором силы и положительной полуосью координат. Не забыть, что определяется алгебраическая сумма.
2. При ответе на вопрос 4 сначала следует определить возможные направления реакций в стержнях, мысленно убирая по очереди стержни и рассматривая возможные перемещения (см. лекцию 1).
Затем записать алгебраические суммы проекций сил на оси Ох и Оу. Полученные уравнения сравнить с приведенными.
5. Ответьте на вопросы тестового задания.
Источник: https://infopedia.su/2x2d7c.html
Равнодействующая системы сходящихся сил

Система сходящихся сил
Пусть, к абсолютно твердому телу приложена система N сил (F1, F2, … FN), расположенных в пространстве так, что их линии действия пересекаются в одной точке О (рисунок 1).
Такую систему сил называют системой сходящихся сил. Упростим систему сходящихся сил, т.е. решим первую задачу статики.
Приведение к равнодействующей
Докажем, что данная система сил эквивалентна одной силе, т.е. приводится к равнодействующей силе.
В самом деле, так как сила есть вектор скользящий, то все силы данной системы можно перенести вдоль линий их действия в точку О.
Далее, по четвертой аксиоме, силы F1 и F2 можно заменить их равнодействующей R1,2 (рисунок 1), которая определяется диагональю параллелограмма, построенного на этих силах как на сторонах, и направленной по этой диагонали, т.е.
где R1,2=F1+F2.
Далее можно записать аналогичные соотношения для полученной равнодействующей силы R*1,2 и силы F3, тогда
(R1,2 F3) ~ (F1, F2, F3) ~ R1,2,3,
где R1,2,3=F1+F2+F3 и т.д.
Для системы N сил окончательно будем иметь
R*= F1 + F2 + … + FN= ∑Fi . (1)
На рисунке 2, a показано построение равнодействующей указанным способом на примере системы, состоящей из четырех сил. Однако процесс определения равнодействующей удобнее вести иным путем, с помощью построения так называемого силового многоугольника.
Силовой многоугольник
Из конца вектора силы F1 (точки В) проводим вектор ВС, геометрически равный силе F2. Из конца этого вектора (точки С) проводим вектор СD равный силе F3. Из конца этого вектора (точки D) проводим вектор DE, равный силе F4.

Рисунок 2
Полученный многоугольник ABCDE называется силовым многоугольником. Процесс его построения хорошо виден на рисунке 2, б. Стороны силового многоугольника называются составляющими силами.
- Вектор АЕ, соединяющий начало А первой силы с концом Е последней силы и направленный навстречу составляющим силам, называется замыкающей стороной силового многоугольника.
- Следовательно, равнодействующая системы сходящихся сил изображается в выбранном масштабе замыкающей силового многоугольника, построенного на составляющих силах.
- Нахождение равнодействующей системы сходящихся сил по правилу силового многоугольника называется векторным или геометрическим сложением сил.
Таким образом, мы доказали, что система сходящихся сил в общем случае эквивалентна одной силе, т.е. равнодействующей, которая приложена в точке пересечения линий действия всех сил и равна их геометрической сумме.
Вычисление равнодействующей
Для аналитического определения равнодействующей найдем ее проекции Rx, Ry, Rz на оси декартовой системы координат. Имеем
Rx = ∑ Fkx ,
Ry = ∑ Fky ,
Rz = ∑ Fkz . (2)
Тогда величина равнодействующей определится следующей формулой:
![]()
или

Для определения направления равнодействующей R* воспользуемся обычными выражениями для направляющих косинусов:
cos α = Rx/R, cos β = Ry/R, cos γ = Rz/R. (5)
- Здесь α , β , γ — углы между положительным направлением осей координат и равнодействующей.
- Равенства (2)-(5) позволяют определить модуль и направление равнодействующей по заданным проекциям составляющих сил.
- В случае плоской системы сходящихся сил оси координат можно взять в плоскости действия сил и тогда формулы (2)-(5) упрощаются.
- >> Условия равновесия системы сходящихся сил
Источник: https://isopromat.ru/teormeh/kratkaja-teoria/sistema-shodashihsya-sil-privedenie-k-ravnodejstvuushej
Модуль силы, скорости, импульса. Что это?!
В статье разберемся, что такое модуль. Модуль силы, скорости, импульса, что это всё? Давайте разбираться! 
Абсолютная величина, известная так же, как модуль, это всегда некое неотрицательное число, чье определение всегда зависит от типа числа. Символически модуль обозначается как: | x |.
Сила и модуль силы
В процессе изучения физики приходится сталкиваться с различными явлениями, рассчитывать скорость, силу и многие другие параметры. Не менее важно понять какими методами, и в каких единицах делаются расчеты по характеристикам этих явлений. Одна из физических величин это сила.
Сила представляет собой величину, которая способна показать меру воздействия на тело посредством другого тела или со стороны полей. Взаимодействие образуется за счет тех полей, которые создаются самими телами в случае контакта. Всего различают четыре вида взаимодействия: слабое, сильное, гравитационное, электромагнитное.
Сила обозначается буквой F от латинского слова fortis, что в переводе означает сильный.
Что такое модуль силы?

Сила является векторной величиной, это значит, что она обладает, так как направлением, так и модулем. Не так часто встречается случай, когда на тело воздействует одна единственная величина, чаще всего их несколько. В таком случае речь о равнодействующей силы, которая формируется за счет суммирования всех сил, влияющие на тело одновременно. Стоит отметить, что параметр равнодействующая сила является искусственным и создан только для удобства проведения расчетов.
Но что же это модуль силы? Модуль является абсолютной величиной. Это такая величина, которая отражается числом с плюсом во всех случаях. Другими словами характеристики какого-то процесса или явления выражены конкретными числами. Каждая сила характеризуется направлением и величиной, эта величина и есть модуль, вот что это модуль силы.
Модуль равнодействующих двух сил определяется по формулам:
- F=F1 + F2 (в случае сил с одинаковым направлением)
- F=F1 — F2 (силы с разным направлением)
Для модуля равнодействующих нескольких сил все намного сложнее. Для начала надо вводить систему координат, записать и высчитать проекции сил, потом использовать теорему Пифагоры.
Исаак Ньютон внес серьезный вклад в работу над различными видами сил. В связи с этим в качестве единицы измерения силы применяется Н (Ньютон).
Что это модуль скорости?

Каждое тело в процессе перемещения развивает энную скорость, которая характеризуется двумя параметрами: направление и модуль. Что же это модуль скорости? Это число, обозначающее, насколько быстро перемещается тело. Сама скорость является вектором. У нее есть все свойства вектора перемещения, так как выражается посредством него и обладает всеми свойствами данного вектора.
Для определения модуля скорости необходимо учитывать закон движения со всеми своими правилами. Вычисление модуля скорости может осуществляться посредством графика движения.
Если недостаточно понятно, что это модуль скорости тела можно использовать одно из понятий: скалярная величина и алгебраическая скорость.
Скорость как вектор это величина с направлением и численным значением, при этих условиях модуль скорости тела это не что иное, как длина этого вектора.
Чаще всего речь о прямолинейном движении в рамках координат (x;t). В таком случае для определения данного параметра подойдет формула:
v = S/t = (x — x0)/t.
Это значит, что необходимо нужно отнять начальную координату от конечной координаты. Полученный результат нужно разделить на то время, за которое имело место изменение координаты.
Пример определения модуля скорости одного тела относительно другого на основе задачи: два тела перемещаются со скоростью 8 и 6 м/с. Направление их движения перпендикулярное друг другу. Поэтапное решение осуществляется таким образом:
- Вычисляется скорость v21 на базе закона сложения скоростей v2 = v21 + v1, а значит v21 = v2 – v1.
- Определяется модуль скорости тела согласно теореме Пифагора.
Модуль импульса и модуль оси

Импульс представляет собой векторную величину, чье направление идентично направлению вектора скорости. Он может поменяться только в том случае, если произойдет изменение скорости под воздействием какой-то силы. Но что это модуль импульса и как он рассчитывается? Модуль импульса определяется согласно произведению массы тела на скорость. Его можно легко вычислить, если есть данные по скорости и по массе.
Что это модуль оси? Разъяснение данного понятия, может быть сделана на основе определения понятия ось. Ось представляет собой прямую с заданным направлением. В каком-то роде можно сказать, что это нечто иное, как вектор с величиной модуля, которая тянется к бесконечности. Это и есть модуль оси.
Для обозначения оси можно использовать любую букву: t, Z, Y, X и т.д. На ней определяется точка О, известная как начало отсчета. Все расстояния до других точек определяются относительно нее. Для того чтобы сделать проекцию точки на ось, нужно провести перпендикулярную прямую через эту точку на саму ось.
В таком случае проекция этой точки, сама точка.
Если материал был полезен, вы можете отправить донат или поделиться данным материалом в социальных сетях:
Источник: https://reshit.ru/modul-sily-skorosti-impulsa-chto-eto
равнодействующую сил
равнодействующую сил
Задача 40587
Определить аналитически равнодействующую заданной системы сил. Определить геометрически равнодействующую заданной системы сил. Построить равнодействующую заданной системы сил. Данные: F1 = 4 kH, F2 = 3 kH, F3 = 8 kH, угол альфа равно 45°, бета = 165°,гама = 150°.
- Задача 19957
- Определить модуль равнодействующей сходящихся сил F1 и F2, если известны их проекции на декартовы оси координат: F1x = 3 Н, F1y = 6 Н, F2x = 5 Н, F2y = 4 Н.
- Задача 19961
Равнодействующая плоской системы сходящихся сил равна нулю. Определить модуль силы , если известны проекции трех других сил на оси координат: F2x = 4 H, F2y = 7 H, F3x = –5 H, F3y = –5 H, F4x = –2 H, F4y = 0.
Задача 26587
Материальная точка массой т = 22 кг движется по окружности радиуса R = 10 м согласно уравнению s = 0,3t2. Определить модуль равнодействующей сил, действующих на точку, в момент времени t = 5 с.
Задача 15071
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 10 см, b = 15 см, c = 20 см, I1 = 1 А, I2 = 2 А.
Задача 15072
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 2 см, b = 4 см, c = 10 см, I1 = 5 А, I2 = 10 А.
Задача 15073
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 5 см, b = 5 см, c = 5 см, I1 = 2 А, I2 = 4 А.
Задача 15074
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 1 см, b = 2 см, c = 4 см, I1 = 3 А, I2 = 5 А.
Задача 15075
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 3 см, b = 6 см, c = 2 см, I1 = 10 А, I2 = 20 А.
Задача 15076
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 15 см, b = 10 см, c = 8 см, I1 = 4 А, I2 = 2 А.
Задача 15077
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 4 см, b = 5 см, c = 6 см, I1 = 15 А, I2 = 10 А.
Задача 15078
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 6 см, b = 3 см, c = 1 см, I1 = 6 А, I2 = 5 А.
Задача 15079
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 20 см, b = 10 см, c = 5 см, I1 = 2 А, I2 = 5 А.
Задача 15080
Проволочная рамка расположена в одной плоскости с длинным прямым проводом так, что две ее стороны параллельны проводу. Определить равнодействующую силу, действующую на рамку. a = 30 см, b = 15 см, c = 10 см, I1 = 8 А, I2 = 4 А.
Задача 17726
Материальная точка массой 0,2 кг движется из состояния покоя с ускорением a = 0,8ti + 0,9t2j – k, м/с2, где векторы i, j, k являются ортами декартовой системы координат. Какую работу совершила равнодействующая сила за вторую секунду движения?
Задача 17727
Материальная точка массой 0,2 кг движется из состояния покоя с ускорением a = 6ti –3t2j, м/с2, где векторы i, j, k являются ортами декартовой системы координат. Какую работу совершила равнодействующая сила за вторую секунду движения?
Источник: http://reshenie-zadach.com.ua/fizika/1/ravnodejstvuyushhuyu_sil.php
Содержание:
Система сходящихся сил:
Рассмотрим одну из важных систем сил — систему сходящихся сил. Для этой системы сил следует рассмотреть приведение ее к простейшему виду и установить условия равновесия.
Системой сходящихся сил (или пучком сил) называют такую систему сил, линии действия которых пересекаются в одной точке — центре пучка. Сходящиеся системы сил могут быть пространственными и плоскими, т. е. расположенными в одной плоскости.
Приведение к равнодействующей силе
Рассмотрим общий случай пространственной системы сходящихся сил. Так как сила, действующая на твердое тело, есть вектор скользящий, то можно считать, что силы системы 
Применяя к первым двум силам пучка 
Затем по правилу параллелограмма складываем силы  и
и  и получаем их равнодействующую:
и получаем их равнодействующую:

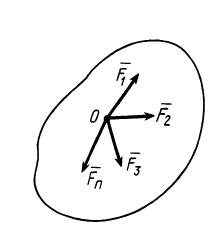
Рис. 12
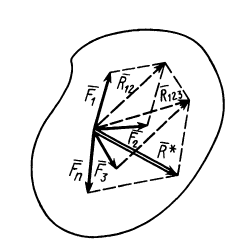
Рис. 13
и т. д. Продолжая процесс векторного сложения сил для всех  сил, получим
сил, получим

Таким образом, система сходящихся сил эквивалентна одной силе  , которая и является равнодействующей этой системы сил.
, которая и является равнодействующей этой системы сил.
Процесс последовательного применения к силам правила параллелограмма, или их векторного сложения, приводит к построению силового многоугольника из заданных сил. В силовом многоугольнике конец одной из сил служит началом другой (рис. 14). Равнодействующая сила  в силовом многоугольнике соединяет начало первой силы с концом последней, т. е. изображается замыкающей силового многоугольника, который в общем случае является незамкнутым. Силы в силовом многоугольнике можно изображать в любой последовательности. От этого изменится форма силового многоугольника, а замыкающая не изменится; следовательно, не изменится и равнодействующая сила.
в силовом многоугольнике соединяет начало первой силы с концом последней, т. е. изображается замыкающей силового многоугольника, который в общем случае является незамкнутым. Силы в силовом многоугольнике можно изображать в любой последовательности. От этого изменится форма силового многоугольника, а замыкающая не изменится; следовательно, не изменится и равнодействующая сила.
Для пространственной системы сходящихся сил силовой многоугольник является пространственной фигурой, для плоской— плоской. Для плоской системы сходящихся сил равнодействующую силу можно определить графически путем построения замыкающей силового многоугольника в выбранном для сил масштабе. Для пространственной системы сходящихся сил пришлось бы силовой многоугольник строить в пространстве из стержней.
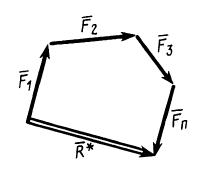
Рис. 14
Итак, система сходящихся сил в общем случае приводится к одной силе—равнодействующей этой системы сил, которая изображается замыкающей силового многоугольника, построенного на силах системы. Линия действия равнодействующей силы проходит через центр пучка параллельно замыкающей силового многоугольника.
Для аналитического определения равнодействующей силы следует выбрать систему прямоугольных осей координат и воспользоваться известной из геометрии теоремой о том, что проекция замыкающей любого многоугольника на какую-либо ось равна алгебраической сумме проекций составляющих его сторон на ту же ось.
Так как равнодействующая сила  является замыкающей силового многоугольника, или векторной суммой сил, то
является замыкающей силового многоугольника, или векторной суммой сил, то

Проецируя векторы векторного равенства на прямоугольные оси координат, согласно теореме о проекции замыкающей получим

По проекциям определяем модуль равнодействующей силы и косинусы углов ее с осями координат по формулам

В формуле (3) перед квадратным корнем всегда берут знак плюс, так как определяется модуль равнодействующей силы.
В случае плоской системы сходящихся сил одну из координатных осей, обычно  , выбирают перпендикулярной силам, тогда каждая из сил пучка даст проекцию на эту ось, равную нулю, а следовательно, будет равна нулю и проекция равнодействующей силы на эту ось, т. е.
, выбирают перпендикулярной силам, тогда каждая из сил пучка даст проекцию на эту ось, равную нулю, а следовательно, будет равна нулю и проекция равнодействующей силы на эту ось, т. е.
Условия равновесия системы сходящихся сил
Для равновесия системы сходящихся сил, приложенных к твердому телу, замыкающая силового многоугольника, изображающая равнодействующую силу, должна обратиться в точку, т. е. конец последней силы в многоугольнике должен совпасть с началом первой силы. Такой силовой многоугольник называют замкнутым (рис. 15). Получено условие равновесия сходящихся сил в геометрической форме: для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым. Для случая трех сходящихся сил при равновесии должен быть замкнутым силовой треугольник, построенный из трех сил.
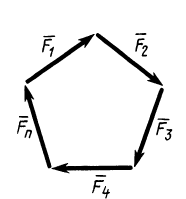
Рис. 15
Для определения неизвестных сил при равновесии более предпочтительным является использование условий равновесия системы сходящихся сил в аналитической форме. Так как при равновесии системы сходящихся сил равнодействующая сила должна быть равна нулю (силовой многоугольник замкнут), то из этого следует, что равно нулю подкоренное выражение в (3), состоящее из суммы положительных величин. Таким образом, равны нулю квадраты каждой из величин подкоренного выражения, а следовательно, равны нулю и сами величины. Получаем условия равновесия пространственной системы сходящихся сил в аналитической форме:

т. е. для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций сил на каждую из трех прямоугольных осей координат были равны нулю.
В случае плоской системы сходящихся сил одну из осей координат, обычно , выбирают перпендикулярной силам, а две другие оси—соответственно в плоскости сил. Тогда третье условие из (5) превратится в тождество  . Отбрасывая его, получаем
. Отбрасывая его, получаем

т. е. для равновесия плоской системы сходящихся сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных координатных осей, лежащих в плоскости сил, были равны нулю.
Проецирование силы на оси координат
Если дана сила  , то ее проекции на прямоугольные оси координат вычисляются по формулам
, то ее проекции на прямоугольные оси координат вычисляются по формулам

где  — единичные векторы, направленные по осям координат. Косинусы углов силы с осями координат удовлетворяют условию
— единичные векторы, направленные по осям координат. Косинусы углов силы с осями координат удовлетворяют условию

Из трех углов независимыми являются только два.
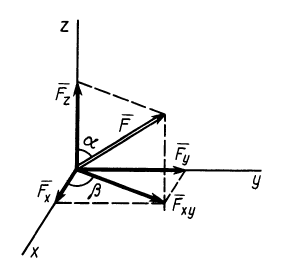
Рис. 16
При проецировании силы на прямоугольные оси координат целесообразно использовать тоже два угла. Для этого предварительно силу разлагают на две взаимно перпендикулярные составляющие, одна из которых параллельна какой-либо оси координат, например  , а другая находится в координатной плоскости двух других осей, в нашем случае — координатной плоскости
, а другая находится в координатной плоскости двух других осей, в нашем случае — координатной плоскости  (рис. 16). Получаем
(рис. 16). Получаем
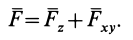
Проецируя векторы векторного равенства на координатные оси, имеем
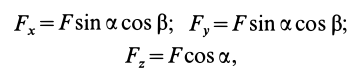
так как
При проецировании использованы только два угла:  и
и  .
.
Векторные величины  ,
,  ,
,  называются составляющими силы
называются составляющими силы  по осям координат. Скалярные величины , , являются проекциями силы на оси координат. Таким образом, силу на оси координат проецируют обычно в два приема. Сначала ее проецируют на одну из осей и на координатную плоскость двух других осей. Проекция силы на плоскость является вектором. Этот вектор затем проецируют на оси координат, расположенные в плоскости.
по осям координат. Скалярные величины , , являются проекциями силы на оси координат. Таким образом, силу на оси координат проецируют обычно в два приема. Сначала ее проецируют на одну из осей и на координатную плоскость двух других осей. Проекция силы на плоскость является вектором. Этот вектор затем проецируют на оси координат, расположенные в плоскости.
Пример 1.
Подъемный кран, имеющий вертикальную ось вращения  , состоит из стержней, скрепленных шарнирами. Ось крана закреплена с помощью подпятника
, состоит из стержней, скрепленных шарнирами. Ось крана закреплена с помощью подпятника  и подшипника
и подшипника  (рис. 17, а). Считая стержни и весь кран невесомыми, определить силы реакций в подпятнике и в подшипнике, усилия в стержнях 1, 2, 3, 4, если известны размеры
(рис. 17, а). Считая стержни и весь кран невесомыми, определить силы реакций в подпятнике и в подшипнике, усилия в стержнях 1, 2, 3, 4, если известны размеры  и
и  , а также углы
, а также углы  . Стержни 2 и 5 горизонтальны. Кран с помощью троса
. Стержни 2 и 5 горизонтальны. Кран с помощью троса  удерживает груз, сила тяжести которого равна
удерживает груз, сила тяжести которого равна  .
.
Решение. Считая кран твердым телом, освободим его от связей, которыми являются подпятник и подшипник, заменив их силами реакций связей. Сила реакции подшипника (цилиндрический шарнир) перпендикулярна его оси. Направление силы реакции подпятника заранее не известно и подлежит определению. На весь кран, находящийся в равновесии, действуют три силы:  ,
,  ,
,  (рис. 17,6). Линии действия этих сил должны пересекаться в одной точке, т. е. линия действия силы
(рис. 17,6). Линии действия этих сил должны пересекаться в одной точке, т. е. линия действия силы  должна пройти через точку
должна пройти через точку  , в которой пересекаются линии действия сил
, в которой пересекаются линии действия сил  и
и  . Три силы должны образовывать также замкнутый силовой треугольник. Отложим силу в выбранном масштабе и проведем через ее начало и конец линии, параллельные силам
. Три силы должны образовывать также замкнутый силовой треугольник. Отложим силу в выбранном масштабе и проведем через ее начало и конец линии, параллельные силам  и
и  . В полученном силовом треугольнике три силы должны быть направлены друг за другом (рис. 17, в). Из полученного прямоугольного треугольника находим
. В полученном силовом треугольнике три силы должны быть направлены друг за другом (рис. 17, в). Из полученного прямоугольного треугольника находим
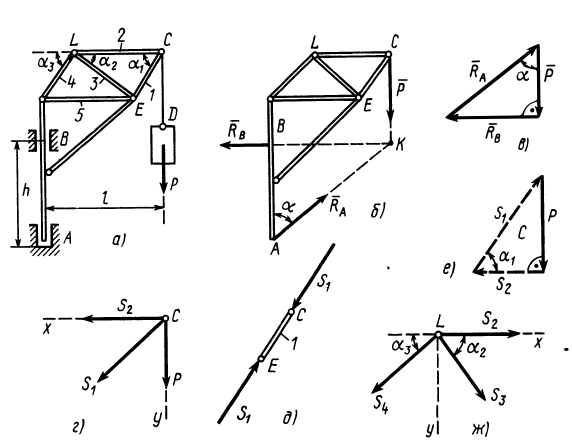
Рис. 17
Из геометрического треугольника
Для определения усилий в стержнях 1 и 2 применим метод вырезания узлов. Для этого рассмотрим равновесие отдельного шарнира или узла С. На этот узел действуют сила Р через трос и силы реакций стержней 1 и 2, которые следует мысленно отбросить. Силы реакций стержней на узел должны быть направлены по стержням, так как на эти стержни между их шарнирами другие силы не действуют. Стержни являются шарнирными. (Условимся силы реакций стержней направлять от узла (рис. 17, г) и знак вектора у сил на рисунке не ставить, чтобы не увеличивать без необходимости число обозначений для одинаковых по числовому значению сил.)
Выбрав в точке  оси координат, составим условия равновесия для плоской системы сходящихся сил, действующих на узел
оси координат, составим условия равновесия для плоской системы сходящихся сил, действующих на узел  :
:

Эти условия в рассматриваемом случае принимают форму в проекциях на оси:
Из полученных уравнений получаем:

Знак  у
у  показывает, что направление этой силы противоположно принятому, т. е. направлено к узлу. Рассматривая равновесие отдельного стержня 1, убеждаемся, что на него действуют только две силы со стороны узлов и
показывает, что направление этой силы противоположно принятому, т. е. направлено к узлу. Рассматривая равновесие отдельного стержня 1, убеждаемся, что на него действуют только две силы со стороны узлов и  . Эти силы должны быть при равновесии равны по модулю и противоположны по направлению. Узел действует на стержень 1 с силой , противоположной по направлению силе действия стержня на узел (рис.17, д). Таким образом, получаем, что при рассмотрении равновесия узла , когда имеет отрицательное значение, стержень 1 будет сжат;
. Эти силы должны быть при равновесии равны по модулю и противоположны по направлению. Узел действует на стержень 1 с силой , противоположной по направлению силе действия стержня на узел (рис.17, д). Таким образом, получаем, что при рассмотрении равновесия узла , когда имеет отрицательное значение, стержень 1 будет сжат;  получили с плюсом. Следовательно, стержень 2 будет испытывать растяжение.
получили с плюсом. Следовательно, стержень 2 будет испытывать растяжение.
На узел действуют три силы, и они поэтому должны образовывать замкнутый силовой треугольник. Построение силового треугольника следует начать с известной силы  , проводя через ее концы линии, параллельные неизвестным по значению силам реакций стержней (рис. 17, е). Из силового треугольника можно определить силы и
, проводя через ее концы линии, параллельные неизвестным по значению силам реакций стержней (рис. 17, е). Из силового треугольника можно определить силы и  .
.
Из уравнений равновесия или силового треугольника можно определить только две неизвестные силы. Поэтому при дальнейшем решении задачи следует переходить к рассмотрению равновесия узла, на который действуют не более двух неизвестных сил. Таким узлом является узел  . На узел действуют три неизвестные силы. При рассмотрении равновесия узла
. На узел действуют три неизвестные силы. При рассмотрении равновесия узла  будем направлять силы реакций стержней опять от этого узла (рис. 17,ж) независимо от ранее полученных знаков для них. В уравнения равновесия уже известную силу
будем направлять силы реакций стержней опять от этого узла (рис. 17,ж) независимо от ранее полученных знаков для них. В уравнения равновесия уже известную силу  следует подставить со знаком плюс, полученным для нее ранее. Условия равновесия сил, действующих на узел , имеют форму:
следует подставить со знаком плюс, полученным для нее ранее. Условия равновесия сил, действующих на узел , имеют форму:

Из этих уравнений находим 
Подставляя в выражение для  полученное значение
полученное значение  , получим
, получим
Усилие  при положительном
при положительном  отрицательно. Следовательно, стержень 3 сжат. Усилие
отрицательно. Следовательно, стержень 3 сжат. Усилие  положительно. Поэтому стержень 4 растянут.
положительно. Поэтому стержень 4 растянут.
Для узла  можно построить также замкнутый силовой треугольник и решить задачу нахождения неизвестных сил геометрически.
можно построить также замкнутый силовой треугольник и решить задачу нахождения неизвестных сил геометрически.
Пример 2.
Груз с силой тяжести  прикреплен с помощью троса к шарниру
прикреплен с помощью троса к шарниру  , который крепится к вертикальной стене тремя стержнями, два из которых расположены в горизонтальной плоскости, а третий — в вертикальной, с помощью шарниров. Сила сопротивления груза от ветра
, который крепится к вертикальной стене тремя стержнями, два из которых расположены в горизонтальной плоскости, а третий — в вертикальной, с помощью шарниров. Сила сопротивления груза от ветра  горизонтальна и параллельна стене. Определить силу натяжения троса и усилия в стержнях, считая стержни невесомыми, если
горизонтальна и параллельна стене. Определить силу натяжения троса и усилия в стержнях, считая стержни невесомыми, если  ,
,  (рис. 18, а).
(рис. 18, а).
Решение. На находящийся в равновесии груз  действует система трех сходящихся сил, расположенных в вертикальной_ плоскости, параллельной стене. Это сила тяжести
действует система трех сходящихся сил, расположенных в вертикальной_ плоскости, параллельной стене. Это сила тяжести  , сила сопротивления
, сила сопротивления  и сила натяжения троса
и сила натяжения троса  , направленная по нему (рис. 18,6). Сила
, направленная по нему (рис. 18,6). Сила  должна уравновесить равнодействующую сил
должна уравновесить равнодействующую сил  и
и  . Следовательно,
. Следовательно,

так как силы  и
и  перпендикулярны. Сила
перпендикулярны. Сила  составляет с вертикалью угол
составляет с вертикалью угол  , для которого
, для которого
Рассмотрим равновесие шарнира  , на который действуют силы реакции трех стержней
, на который действуют силы реакции трех стержней  , направленные по стержням, и сила натяжения троса, равная
, направленные по стержням, и сила натяжения троса, равная  (рис. 18, в). Имеем пространственную систему сходящихся сил, условия равновесия которой имеют форму
(рис. 18, в). Имеем пространственную систему сходящихся сил, условия равновесия которой имеют форму

В рассматриваемом случае для выбранных осей координат имеем:
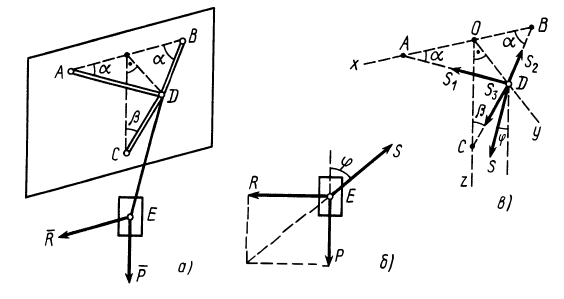
Рис. 18
Так как

то система уравнений принимает форму
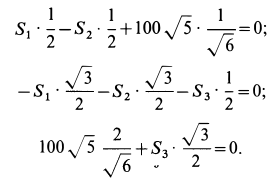
Решая эту систему уравнений, получаем:

Усилия в стержнях направляли от рассматриваемого узла и получили  и
и  со знаком минус, a
со знаком минус, a  — со знаком плюс. Это служит указанием, что стержни 1 и 3 подвергаются сжатию, а стержень 2 — растяжению.
— со знаком плюс. Это служит указанием, что стержни 1 и 3 подвергаются сжатию, а стержень 2 — растяжению.
Силы, сходящиеся в одной точке
Если на точку А действуют n сил, расположенных в одной плоскости (рис. 22), то эти силы можно сложить геометрически, построив многоугольник векторов, который в нашем случае называется многоугольником сил.
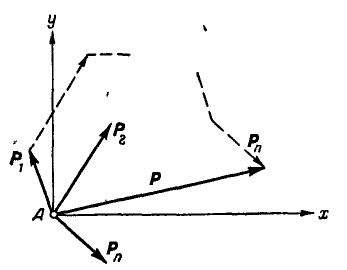
Рис. 22.
Обозначая равнодействующую сил через Р, можем написать:

Проектируя равнодействующую и составляющие на координатные оси, проведенные через точку А, по формуле (3) имеем:
Величину равнодействующей находим по формуле (7):

Направление равнодействующей определяем по формулам (6):

Может оказаться, что при построении многоугольника сил конец последней силы совпадет с началом первой; в этом случае многоугольник сил получается замкнутым, равнодействующая сила равна нулю и силы находятся в равновесии. Таким образом, геометрическое условие равновесия сил, приложенных к точке, заключается в том, что многоугольник этих сил должен быть замкнут.
В этом случае Р=0, а поэтому и  , а это может быть при условии, когда
, а это может быть при условии, когда  и
и  , что возможно, если:
, что возможно, если:
или сокращенно:

Уравнения (27) называются уравнениями равновесия сил, приложенных к точке, и выражают аналитические условия равновесия этих сил.
Рассмотрим равновесие трех сил  , действующих на тело (рис. 23).
, действующих на тело (рис. 23).
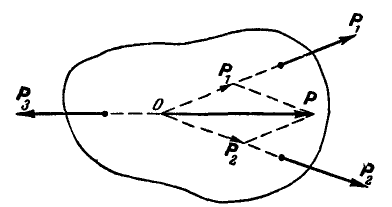
Рис. 23.
Пусть в точке О пересекаются линии действия любых двух сил, например  и
и  , тогда эти силы можно перенести в точку О и по правилу параллелограмма заменить одной силой Р.
, тогда эти силы можно перенести в точку О и по правилу параллелограмма заменить одной силой Р.
Теперь на тело уже действуют две силы Р и А, равновесие которых по аксиоме 2 возможно, если они будут направлены по одной прямой.
Отсюда заключаем, что три силы, действующие на тело, и расположенные в одной плоскости, могут находиться в равновесии только тогда, когда их линии действия пересекаются в одной точке.
- Заказать решение задач по теоретической механике
Задача 1.
К точке В шарнирного кронштейна АВС (рис. 24, а) подвешен груз Q = 100 кГ. Определить усилия  в стержнях ВА и ВС.
в стержнях ВА и ВС.
Решение. Для определения усилия  в стержне ВА, который является связью для точки В, освободимся от связи и введем реакцию стержня, которая, согласно аксиоме 6, будет равна и прямо цретивоположна искомому усилию
в стержне ВА, который является связью для точки В, освободимся от связи и введем реакцию стержня, которая, согласно аксиоме 6, будет равна и прямо цретивоположна искомому усилию  (рис. 24, б). Теперь точка В находится в равновесии под действием двух сил
(рис. 24, б). Теперь точка В находится в равновесии под действием двух сил  и
и  и имеет возможность двигаться по дуге окружности радиуса ВС (рис. 24, б). Поэтому равновесие точки В возможно будет только тогда, когда равнодействующая этих двух сил
и имеет возможность двигаться по дуге окружности радиуса ВС (рис. 24, б). Поэтому равновесие точки В возможно будет только тогда, когда равнодействующая этих двух сил  и
и  пойдет по направлению оси стержня ВС. Но это равносильно тому, что проекция ее на направление
пойдет по направлению оси стержня ВС. Но это равносильно тому, что проекция ее на направление  , перпендикулярное к стержню ВС, будет равна нулю, или, что то же, сумма проекций составляющих на это направление равна нулю:
, перпендикулярное к стержню ВС, будет равна нулю, или, что то же, сумма проекций составляющих на это направление равна нулю:  , откуда
, откуда  .
.
Для нахождения усилия  в стержне ВС поступаем аналогично. Устраняем связь ВС и взамен ее вводим реакцию
в стержне ВС поступаем аналогично. Устраняем связь ВС и взамен ее вводим реакцию  (рис. 24, в); тогда точка В должна находиться в равновесии под действием двух сил и . Проектируя эти силы на направление у возможного движения точки В, получим условие равновесия точки В в виде:
(рис. 24, в); тогда точка В должна находиться в равновесии под действием двух сил и . Проектируя эти силы на направление у возможного движения точки В, получим условие равновесия точки В в виде:  , откуда
, откуда 
При решении этой задачи можно было бы освободиться одновременно от обеих связей ВА и ВС, вводя взамен их реакции связей  и
и  (рис. 24,г).
(рис. 24,г).
Тогда для свободной точки В можно написать два уравнения равновесия (27) в виде:

отсюда находим, что 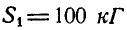 и
и 
Знак минус у  указывает на то, что направление реакции нами выбрано неправильно и это направление следует изменить на обратное. На рисунке 24, д дано правильное направление стрелок реакций связей.
указывает на то, что направление реакции нами выбрано неправильно и это направление следует изменить на обратное. На рисунке 24, д дано правильное направление стрелок реакций связей.
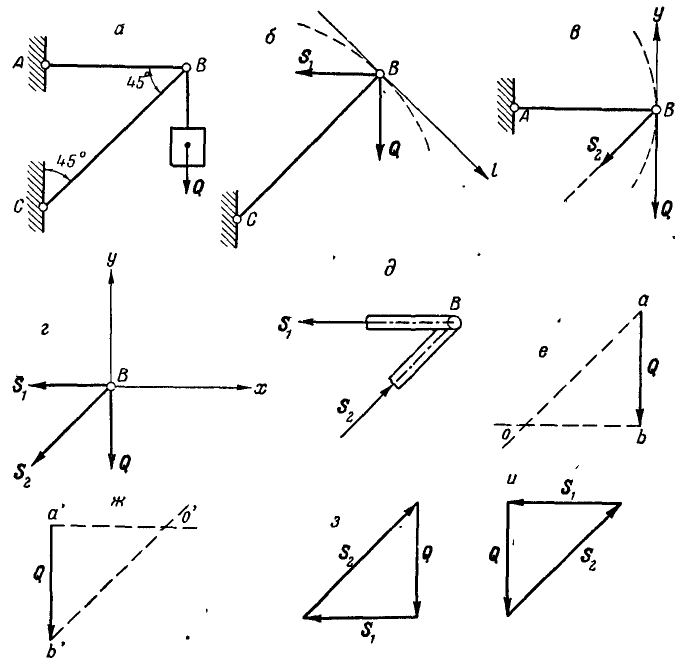
Рис. 24.
При неподвижной точке В реакция направленная от узла, будет растягивать стержень, а реакция 58, направленная к узлу, будет сжимать стержень, что ясно видно из чертежа.
Решим теперь эту задачу геометрическим способом. Все силы, заданные и реактивные, действующие на точку В, взаимно уравновешиваются, а поэтому многоугольник этих сил должен быть замкнут. На этом основании проводим вектор, равный силе  , и из начала и конца этого вектора проводим направления, параллельные линиям действия реакций связей ВА и ВС (рис. 24, е или 24, ж); в пересечении этих направлений получаем точку О или О’.
, и из начала и конца этого вектора проводим направления, параллельные линиям действия реакций связей ВА и ВС (рис. 24, е или 24, ж); в пересечении этих направлений получаем точку О или О’.
Так как многоугольник сил, действующих на точку В, должен быть замкнут, то стрелки всех сил в полученном многоугольнике сил, в нашем случае — треугольнике (рис. 24, е или 24, ж), должны быть расположены в одном направлении. Исходя из заданного направления силы  , получим правильное направление стрелок реактивных сил
, получим правильное направление стрелок реактивных сил  и
и  (рис. 24, з или 24, м).
(рис. 24, з или 24, м).
Выбрав один из полученных треугольников сил, замечаем, что сила  , перенесенная параллельно самой себе на стержень
, перенесенная параллельно самой себе на стержень  (рис. 24, а или 24, д), будет направлена к узлу В, следовательно, стержень ВС — сжат, а сила направленная от узла В, будет растягивать стержень ВА. Из полученного треугольника сил (рис. 24, з или 24, и) имеем:
(рис. 24, а или 24, д), будет направлена к узлу В, следовательно, стержень ВС — сжат, а сила направленная от узла В, будет растягивать стержень ВА. Из полученного треугольника сил (рис. 24, з или 24, и) имеем:

При решении дальнейших задач аналитическим способом стрелки неизвестных реакций стержней будём направлять всегда от рассматриваемого нами узла; тогда знак минус у модуля реакции какого-либо стержня будет указывать на то, что рассматриваемый нами стержень сжат.
Задача 2.
Определить усилия в стержнях АВ и ВС при действии в шарнире В силы Q=100 кГ, если АВ = ВС =5 м, BD = 0,5 м и шарниры А и С расположены на одной горизонтали (рис. 25, а).
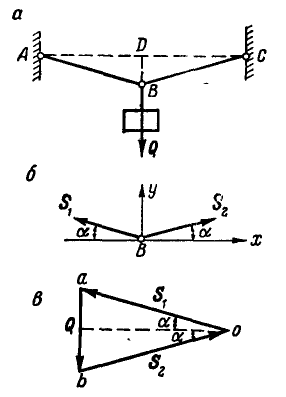
Рис. 25.
Решение. Решим сначала задачу аналитическим способом, для чего рассмотрим равновесие точки В, находящейся под действием трех сил: заданной силы  и реакций связей
и реакций связей  и
и  (рис. 25, б).
(рис. 25, б).
Применяя уравнения равновесия (27), имеем:
Из первого уравнения находим:  ; тогда второе уравнение примет вид:
; тогда второе уравнение примет вид:  , откуда
, откуда  . Из ΔABD имеем:
. Из ΔABD имеем:  , поэтому
, поэтому 
Знак плюс у S указывает на то, что оба стержня ВА и ВС растянуты.
Для решения этой задачи геометрическим способом, построим треугольник равновесия 0ab (рис. 25,в), из которого сразу находим правильное направление реакции  и
и  . Далее
. Далее  , или
, или 
Задача 3.
Однородный цилиндр (рис. 26,а) весом  опирается на гладкую плоскость, наклоненную под
опирается на гладкую плоскость, наклоненную под  к горизонту и удерживается в равновесии горизонтальным канатом 0С. К оси цилиндра О приложена сила Р=400 кГ, направленная параллельно плоскости. Найти реакцию N плоскости и натяжение Т каната ОС.
к горизонту и удерживается в равновесии горизонтальным канатом 0С. К оси цилиндра О приложена сила Р=400 кГ, направленная параллельно плоскости. Найти реакцию N плоскости и натяжение Т каната ОС.
Рис. 26.
Решение. Решим задачу аналитическим способом. Освободившись от связей (рис. 26,6) и составляя для точки О уравнения равновесия (27), имеем:

Подставляя вместо Р и Q их значения и решая полученные уравнения, находим неизвестные силы:
Задача 4.
Жесткое колено ABCD (рис. 27,а), могущее вращаться вокруг шарнира В, опирается в точке D на гладкий уступ. Пренебрегая весом колена, определить реакции связей в точках В и D, если в точке А колена приложена сила Р=100 кГ.
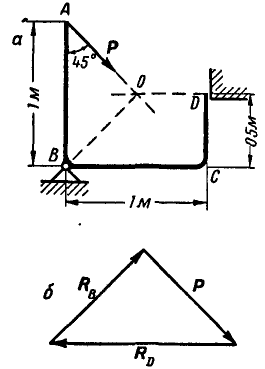
Рис. 27.
Решение. Так как колено находится в равновесии, то три силы, действующие в точках А, В и D, должны пересекаться в одной точке. Продолжаем линию действия силы Р и реакции в точке D, направленной перпендикулярно к плоскости уступа, до взаимного пересечения в точке О; тогда линия действия реакции шарнира В пройдет обязательно через точку О. На рисунке 27, б дано построение треугольника равновесия трех сил  , из которого следует, что
, из которого следует, что  и
и 
Задача 5.
При подъеме плуга на стоянке (рис. 30) поворачивают коленчатый рычаг АВС, вращая рукоятку силой Р. Какова при этом должна быть величина силы Р, если вес части плуга, передающейся на коленчатый рычаг, вращающийся вокруг шарнира В, равен Q = 30 кГ, длина рукоятки АВ = 0,6 м и радиус колеса плуга г = 0,25 м.
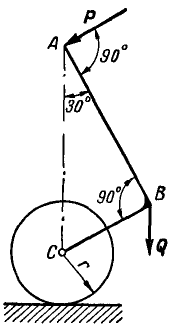
Рис. 30.
Решение. Строим для сил, приложенных к коленчатому рычагу, треугольник равновесия. Из подобия треугольника равновесия и соответствующего треугольника на чертеже находим силу Р.
Ответ: Р = 11 кГ.
- Моменты силы относительно точки и оси
- Теория пар сил
- Приведение системы сил к простейшей системе
- Условия равновесия системы сил
- Аксиомы и теоремы статики
- Приведение системы сил к простейшему виду
- Плоское движение тела
- Принцип виртуальных перемещений
![]()
Если для силы F известны её проекции Fx, Fy, Fz
на координатные оси x, y, z, то можно определить модуль силы и углы, которые они образуют с координатными осями по формулам:
|
F F 2 |
F 2 |
F |
2 |
; |
||||||||||||||||
|
x |
y |
z |
||||||||||||||||||
|
·r |
Fx |
·r |
Fy |
·r |
Fz |
|||||||||||||||
|
cos F |
, x |
; |
cos F, y |
; |
cos F |
, z |
F |
; |
||||||||||||
|
F |
F |
|||||||||||||||||||
|
F |
F |
F |
||||||||||||||||||
|
y |
||||||||||||||||||||
|
arccos |
x |
; |
arccos |
; |
arccos |
z |
. |
|||||||||||||
|
F |
F |
F |
21

Пример 2
Определить модуль и направление силы, если её проекции на координатные оси равны: Fx = 20 H, Fy =
15 H, Fz = 30 H.
Решение
(С использованием пакета Mathcad)
Fx 20 Fy 15 Fz 30
F 
 Fx2 Fy2 Fz2
Fx2 Fy2 Fz2
F 39.051
22
Направляющие косинусы: |
|||||
|
Fx |
0.512 |
Fy |
0.384 |
Fz |
0.768 |
|
F |
F |
F |
Углы в радианах между вектором силы и координатными осями:
|
acos |
Fx |
acos |
Fy |
acos |
Fz |
|
|
F |
F |
F |
||||
|
1.033 |
1.177 |
0.695 |
Углы в градусах:
|
59.193deg |
67.411 deg |
39.806deg |
|
23 |
Задание 3
Определить модуль и направление силы, если её проекции на координатные оси равны: Fx = 50 H, Fy =
12 H, Fz = 20 H.
24

1.6. Главный вектор системы сил
Вектор, равный геометрической сумме векторов сил, системы, называется главным вектором этой системы
1
Чтобы определить главный вектор по величине и направлению введём координатные оси x, y, z и спрое- цируем на них векторное равенство (1). В результате получим
|
Rx =ån |
Fkx ; Ry =ån |
Fky ; Rz =ån |
Fkz ; |
|
1 |
1 |
1 |
R = R2 + R2 + R2 .
x y z 25
Направление главного вектора определяется направ- ляющими косинусами
|
( |
r |
) |
R |
( |
r |
) |
R |
èç |
r |
ø÷ R |
|||||||||||||
|
· |
r |
Rx |
· |
r |
Ry |
æ· |
ö Rz |
||||||||||||||||
|
cos |
R, i |
= |
; |
cos |
R, j |
= |
; |
cosçR, k |
= |
; |
|||||||||||||
|
æR |
ö |
æRy |
ö |
æR |
ö |
||||||||||||||||||
|
ç |
÷ |
ç |
÷ |
ç |
÷ |
||||||||||||||||||
|
a =arccosç |
x |
; |
b =arccosç |
; |
g =arccosç |
z |
. |
||||||||||||||||
|
1 |
èR ø |
1 |
èR |
ø |
1 |
èR |
ø |
||||||||||||||||
|
ç |
26

Задание 4
Определить модуль главного вектора сходящихся системы
сил F1 = 10 H, F2 = 15 H, F3 = 20 H, если 1 = 30o, 2 = 45o,
3 = 60o.
Ответ R = 34,206 H
27

Решение
(С использованием пакета Mathcad)
|
F1 10 |
F2 15 |
F3 20 |
||||||||||
|
1 |
2 |
3 |
||||||||||
|
6 |
4 |
3 |
||||||||||
|
Rx F1 cos 1 F2 cos 2 |
F3 cos 3 |
|||||||||||
|
Ry F1 sin 1 |
F2 sin 2 |
F3 sin 3 |
||||||||||
|
Rx 9.267 |
Ry 32.927 |
|||||||||||
|
R |
Rx2 Ry2 |
|||||||||||
|
R 34.206 |
28 |

1.7. Момент силы относительно точки
Моментом силы относительно точки О называется вектор равный векторному произведению радиус- вектора точки приложения силы относительно точки О на вектор силы:
mo (F) =r ´ F.

Вектор момента приложен в точке О и направлен перпендикулярно плоскости, прохо-дящей через центр О и силу в ту сторону, откуда вращение, которое стремится совершить сила, будет видно происходящим против хода часовой стрелки, рис. 5 .