1.7.1. Как найти проекцию вектора на вектор?
Рассмотрим ненулевые векторы ![]() и
и ![]() :
:
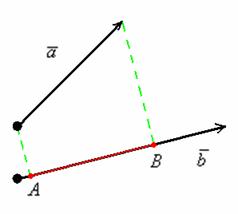
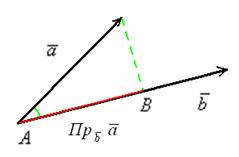
Спроецируем вектор ![]() на вектор
на вектор ![]() , для этого из начала и конца вектора
, для этого из начала и конца вектора ![]() опустим перпендикуляры на вектор
опустим перпендикуляры на вектор ![]() (зелёные пунктирные линии).
(зелёные пунктирные линии).
Представьте,
что на вектор ![]() перпендикулярно сверху падают
перпендикулярно сверху падают
лучи света. Тогда отрезок ![]() будет «тенью»
будет «тенью»
вектора ![]() . Проекцией вектора
. Проекцией вектора ![]() на вектор
на вектор ![]() является ДЛИНА отрезка
является ДЛИНА отрезка ![]() . То есть, ПРОЕКЦИЯ – ЭТО ЧИСЛО.
. То есть, ПРОЕКЦИЯ – ЭТО ЧИСЛО.
Это ЧИСЛО обозначается следующим образом: ![]() , «большим вектором» обозначают вектор КОТОРЫЙ проецируют,
, «большим вектором» обозначают вектор КОТОРЫЙ проецируют,
«маленьким подстрочным вектором» обозначают вектор НА который проецируют.
Сама запись ![]() читается так: «проекция
читается так: «проекция
вектора «а» на вектор «бэ»».
Если угол между векторами ![]() острый (как на рисунке выше), то
острый (как на рисунке выше), то ![]()
Если векторы ![]() ортогональны, то
ортогональны, то ![]() (проекцией является точка, размеры которой считаются нулевыми).
(проекцией является точка, размеры которой считаются нулевыми).
Если угол между векторами ![]() тупой (на рисунке мысленно переставьте стрелочку вектора
тупой (на рисунке мысленно переставьте стрелочку вектора ![]() ), то
), то ![]() (та же длина с добавленным знаком «минус»).
(та же длина с добавленным знаком «минус»).
Отвечу на назревший вопрос: что произойдёт, если вектор «бэ» будет «слишком коротким»? Проводим прямую линию, содержащую
вектор «бэ». И вектор «а» будет проецироваться уже на направление вектора «бэ», попросту – на прямую, содержащую
вектор «бэ». То же самое произойдёт, если вектор «а» отложить в тридесятом царстве – он всё равно легко спроецируется на
прямую, содержащую вектор «бэ».
Из вышесказанного следует, что проекция вектора ![]() на любой ненулевой сонаправленный вектор
на любой ненулевой сонаправленный вектор
![]() будет точно такой же:
будет точно такой же:
![]() – фактически это проекция вектора
– фактически это проекция вектора
![]() на прямую
на прямую ![]() , которая содержит сонаправленные векторы
, которая содержит сонаправленные векторы ![]() (и поскольку векторы свободны, то таких прямых будет
(и поскольку векторы свободны, то таких прямых будет
бесконечно много, все они будут параллельны друг другу);
а если векторы направлены противоположно ![]() , то
, то
добавится знак «минус»:
![]()
Отложим наши подопытные векторы от одной точки:
и рассмотрим прямоугольный треугольник. Косинус угла ![]() – есть отношение прилежащего катета к гипотенузе:
– есть отношение прилежащего катета к гипотенузе:
![]() , но с другой стороны, у нас уже получена
, но с другой стороны, у нас уже получена
формула косинуса угла между векторами:
…все ли догадались, что будет дальше?
Приравниваем формулы:
и сокращаем знаменатели обеих частей на ![]() ,
,
получая формулу для вычисления проекции:

Распишем её в координатах:
Если векторы плоскости ![]() и
и ![]() заданы в ортонормированном базисе
заданы в ортонормированном базисе ![]() , то проекция вектора
, то проекция вектора ![]() на вектор
на вектор ![]() выражается формулой:
выражается формулой:
![]()
Если векторы пространства ![]() заданы в ортонормированном базисе
заданы в ортонормированном базисе ![]() , то проекция вектора
, то проекция вектора ![]() на вектор
на вектор ![]() выражается формулой:
выражается формулой:
![]()
Легко убедиться, что проекция вектора ![]() на
на
коллинеарный вектор ![]() может
может
отличаться лишь знАком, приведу выкладки для «плоского» случая ![]() :
:
![]()
![]() , если
, если ![]() , и
, и ![]() , если
, если ![]()
Задача 34
Найти проекцию вектора ![]() на вектор
на вектор ![]()
Решение в одну строчку:
 , на завершающем шаге я умножил числитель и
, на завершающем шаге я умножил числитель и
знаменатель на ![]() , избавившись тем самым от
, избавившись тем самым от
иррациональности в знаменателе.
Ответ: ![]()
Проекция – это ДЛИНА, поэтому обязательно указываем размерность, правда, если получится знак «минус», то смотреться это
будет своеобразно.
Задача 35
Треугольник задан своими вершинами ![]() .
.
Найти:
а) проекцию стороны ![]() на сторону
на сторону ![]() ;
;
б) проекцию стороны ![]() на сторону
на сторону ![]() .
.
Это задача для самостоятельного решения.
Итак, как найти проекцию вектора ![]() на отрезок с известными концами
на отрезок с известными концами ![]() ? (как вариант, на продолжение этого отрезка). Находим вектор
? (как вариант, на продолжение этого отрезка). Находим вектор ![]() и используем формулу
и используем формулу  . Либо вектор
. Либо вектор ![]() и формулу
и формулу  . В
. В
одном из случаев получится отрицательное значение, и если оно вас напрягает, выберите другой вариант 
О проекции же вектора на прямую поговорим в следующей главе, а пока
выясним геометрический смысл координат векторов в ортонормированном базисе:
 1.7.2. Проекции вектора на координатные оси. Направляющие косинусы
1.7.2. Проекции вектора на координатные оси. Направляющие косинусы
 1.6.9. Как найти угол между векторами в координатах?
1.6.9. Как найти угол между векторами в координатах?
| Оглавление |
Автор: Aлeксaндр Eмeлин
Угол между векторами. Ортогональные проекции векторов
Угол между векторами
Углом между двумя ненулевыми векторами называется угол между равными им векторами, имеющими общее начало, не превосходящий по величине числа .
Пусть в пространстве даны два ненулевых вектора и
(рис.1.22). Построим равные им векторы
и
. На плоскости, содержащей лучи
и
, получим два угла
. Меньший из них, величина
которого не превосходит
, принимается за угол между векторами
и
.
Поскольку направление нулевого вектора не определено, то не определен и угол между двумя векторами, если хотя бы один из них нулевой. Из определения следует, например, что угол между ненулевыми коллинеарными векторами либо равен нулю (если векторы одинаково направлены), либо равен (если векторы противоположно направлены).
Ортогональные проекции векторов
Движение по любой прямой может быть в двух направлениях. Ориентированной прямой называется прямая, на которой выбрано направление, т.е. одно из направлений считается положительным, а противоположное — отрицательным. Для измерения длин отрезков на прямой задается масштабный отрезок, который принимается за единицу.
Ориентированная прямая с заданным масштабным отрезком называется осью.
Любой ненулевой вектор , принадлежащий прямой, называется направляющим вектором для данной прямой, поскольку задает на ней ориентацию. Направление вектора
принимается за положительное, а направление противоположного вектора
— за отрицательное. Кроме того, длину вектора
— можно принять за величину масштабного отрезка на этой прямой. Поэтому можно сказать, что любой ненулевой вектор определяет ось — прямую, содержащую этот вектор, задавая на ней направление и масштабный отрезок.
Ортогональной проекцией вектора на ось, задаваемую вектором
, называется его проекция на ось вдоль прямой (или вдоль плоскости), перпендикулярной данной оси. Ортогональную проекцию вектора
на ось, задаваемую вектором
, будем обозначать
.
Ортогональную проекцию вектора на прямую
(см. разд. 1.2.2 и рис. 1.13) будем обозначать
.
Ортогональную проекцию вектора а на плоскость (см. разд. 1.2.2 и рис. 1.14) будем обозначать
.
Разность между вектором и его ортогональной проекцией называют ортогональной составляющей:
— — ортогональная составляющая вектора
относительно вектора
;
— — ортогональная составляющая вектора
относительно прямой
;
— — ортогональная составляющая вектора
относительно плоскости
.
На рис. 1.23 изображены ортогональные проекции вектора :
— на прямую (или на ось
, задаваемую вектором
) вдоль прямой
(рис.1.23,а);
— на прямую (или на ось
, задаваемую вектором
) вдоль плоскости
(рис.1.23,б);
— на плоскость вдоль прямой
(рис.1.23,в).
На рис. 1.23 изображены ортогональные составляющие вектора :
— относительно оси (вектора
):
(рис.1.23,а);
— относительно плоскости (рис.1.23,в).
Для ортогональных проекций справедлива следующая теорема (см. теорему 1.1 в разд. 1.5).
Теорема 1.2 (об ортогональных проекциях вектора).
1. Если на плоскости заданы две взаимно перпендикулярные прямые и
, то любой вектор
на плоскости можно однозначно представить в виде суммы своих ортогональных проекций на эти прямые, т.е.
(рис. 1.24,а).
2. Если в пространстве заданы три попарно перпендикулярные прямые и
, пересекающиеся в одной точке, то любой вектор
в пространстве можно однозначно представить в виде суммы своих ортогональных проекций на эти прямые, т.е.
(рис. 1.24,6).
3. Квадрат длины вектора на плоскости или в пространстве равен сумме квадратов длин своих ортогональных проекций, т.е.
Первые два утверждения представляют собой частные случаи теоремы 1.1. Третье утверждение следует из теоремы Пифагора (для треугольника (рис. 1.24,а) или треугольников
и
(рис. 1.24,6)).
В формулировке теоремы 1.2 прямые можно заменить осями, задаваемыми попарно ортогональными векторами.
На рис.1.24,а проекции вектора на оси одновременно являются ортогональными составляющими:
и
. На рис. 1.24,6 вектор
является проекцией вектора
на плоскость
, содержащую прямые
и
:
, а вектор
является ортогональной составляющей вектора
относительно плоскости
.
Алгебраическое значение длины проекции
Пусть – угол между ненулевым вектором
и осью, задаваемой вектором
, т.е. угол между ненулевыми векторами
и
.
Алгебраическим значением длины ортогональной проекции вектора на ось, задаваемую вектором
, называется длина его ортогональной проекции
, взятая с положительным знаком, если угол
не превышает
, и с отрицательным знаком, если угол
больше
, т.е.:
Например, для проекций, изображенных на рис. 1.25, , поскольку угол
между векторами
и
острый, a
, так как угол
между векторами
и
тупой.
Некоторые свойства проекций векторов переносятся на алгебраические значения их длин, в частности:
1. — алгебраическое значение длины ортогональной проекции суммы векторов равно сумме алгебраических значений длин ортогональных проекций слагаемых;
2. — алгебраическое значение длины ортогональной проекции произведения вектора на число равно произведению этого числа на алгебраическое значение длины ортогональной проекции вектора
Замечания 1.4.
1. Из определения алгебраического значения длины ортогональной проекции следует (см. также рис.1.25), что , т.е. алгебраическое значение длины ортогональной проекции ненулевого вектора на ось равна произведению длины этого вектора на косинус угла между вектором и осью.
Ортогональную проекцию вектора на ось, задаваемую вектором
, можно представить в виде
Если — единичный вектор, то
.
2. Равенство можно использовать как определение косинуса угла между ненулевыми векторами
и
(или, что то же самое, косинуса угла между осями, заданными ненулевыми векторами
и
(рис. 1.26)).
3. Углом между ненулевым вектором и прямой
называется угол
между вектором
и его ортогональной проекцией
на прямую
. Величина угла
может быть найдена по формуле
4. Углом между ненулевым вектором и плоскостью
называется угол
между вектором
и его ортогональной проекцией
на плоскость
. Величина угла
может быть найдена по формуле
Пример 1.7. Основания и
равнобокой трапеции
равны
и
соответственно; точка
— середина стороны
(рис. 1.27). Найти алгебраические значения длин ортогональных проекций векторов
и
на ось, задаваемую вектором
.
Решение. Пусть — высота трапеции,
— точка пересечения прямых
и
. По свойству равнобокой трапеции
; из равенства треугольников
и
.
Обозначим через искомые алгебраические значения длин ортогональных проекций.Тогда из равенств
,
и свойства 1 алгебраических значений длин проекций следует:
Решая систему находим
, т.е.
.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Проекция вектора на вектор
Рассмотрим
векторы
и
:
Спроецируем
вектор
на
вектор
,
для этого из начала и конца вектора
опустим
перпендикуляры на
вектор
(пунктирные
линии). В данном случае проекцией
вектора
на
вектор
является
ДЛИНА отрезка
.
То есть, ПРОЕКЦИЯ – ЭТО ЧИСЛО.
Данное
ЧИСЛО обозначается следующим образом: ![]()
,
«большим вектором» обозначают
вектор, КОТОРЫЙ проецируют,
«маленьким подстрочным вектором»
обозначают вектор НА
который проецируют.
Сама
запись
читается
так: «проекция вектора «а» на вектор
«бэ»».
Что
произойдёт, если вектор «бэ» будет
«слишком коротким»? Проводим прямую
линию, содержащую вектор «бэ». И вектор
«а» будет проецироваться уже на
направление вектора «бэ»,
попросту – на прямую, содержащую вектор
«бэ». То же самое произойдёт, если вектор
«а» отложить в тридесятом царстве – он
всё равно легко спроецируется на прямую,
содержащую вектор «бэ».
Если
угол между
векторами ![]()
острый (как
на рисунке), то ![]()
Если
векторы
ортогональны,
то ![]()
(проекцией
является точка, размеры которой считаются
нулевыми).
Если
угол между
векторами
тупой (на
рисунке мысленно переставьте стрелочку
вектора
),
то ![]()
(та
же длина, но взятая со знаком минус).
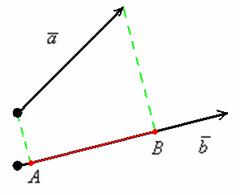
Отложим
данные векторы от одной точки:
Очевидно,
что при перемещении вектора его проекция
не меняется
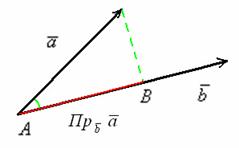
Рассмотрим
прямоугольный треугольник. Косинусом
острого угла называется отношение
прилежащего катета к гипотенузе. В
данном случае:
![]()
С
другой стороны, у нас уже получена
формула косинуса угла между векторами:
Таким
образом:

Сокращаем
знаменатели обеих частей на ![]()
и
получаем формулу для вычисления
проекции:

Формула
выведена, распишем её в координатах:
Если
векторы плоскости
и
,
заданы в ортонормированном базисе
,
то проекция вектора
на
вектор ![]()
выражается
формулой:
![]()
.
Если
векторы пространства
,
заданы в ортонормированном базисе
,
то проекция вектора
на
вектор
выражается
формулой:
![]()
Пример
Найти
проекцию вектора ![]()
на
вектор ![]()
Решение:

Ответ: ![]()
Проекция вектора на координатные оси. Направляющие косинусы вектора
Рассмотрим
вектор плоскости ![]()
,
заданный своими координатами в
ортонормированном базисе
.
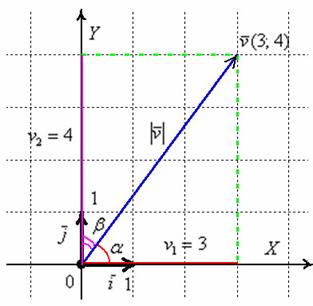
Проекцией
вектора
на
координатную ось ![]()
является
в точности его первая координата: ![]()
.
Обозначим через ![]()
угол
между вектором
и
координатным вектором
: ![]()
.
Тогда:
![]()
(определение
косинуса в прямоугольном треугольнике
недавно упоминалось).
Аналогично
со второй координатой: проекцией
вектора
на
координатную ось ![]()
является
его вторая координата: ![]()
.
Обозначим через ![]()
угол
между вектором
и
координатным вектором
: ![]()
.
Тогда:
![]()
Косинусы ![]()
называются направляющими
косинусами вектора.
Причём, для любого ненулевого вектора
справедливо равенство ![]()
.
Проверим его справедливость для
рассматриваемого вектора:
![]()
,
что и требовалось проверить.
Заметьте,
что приведённые выше выкладки не
изменятся, если вектор
отложить
от любой другой точки плоскости.
Координаты
вектора в ортонормированном базисе –
это его проекции на направления
соответствующих координатных векторов
(координатные оси).
Направляющие
косинусы ненулевого
вектора
,
заданного в ортонормированном
базисе
, выражаются
формулами ![]()
,
а сами координаты вектора можно выразить
через его длину и данные косинусы: ![]()
,
то есть: ![]()
.
С
пространственными векторами, заданными
в ортонормированном базисе
,
разборки точно такие же. Рассмотрим
произвольный ненулевой вектор
.
Его координаты представляют собой
проекции вектора на оси ![]()
соответственно.
Обозначим углы данного вектора с ортами
через: ![]()
.
Тогда направляющие
косинусы вектора выражаются формулами: ![]()
,
и справедливым является равенство ![]()
.
Пример
Найти
направляющие косинусы векторов:
а) ![]()
,
проверить, что
;
б) ![]()
,
проверить, что
.
Решение:
а)
Найдём длину вектора: ![]()
.
Направляющие
косинусы: ![]()
.
Проверка: 
,
что и требовалось проверить.
б)
Найдём длину вектора: ![]()
.
Направляющие
косинусы: ![]()
.
Проверка: 
,
что и требовалось проверить.
Ответ: ![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
«Orthogonal projection» redirects here. For the technical drawing concept, see Orthographic projection. For a concrete discussion of orthogonal projections in finite-dimensional linear spaces, see Vector projection.

The transformation P is the orthogonal projection onto the line m.
In linear algebra and functional analysis, a projection is a linear transformation  from a vector space to itself (an endomorphism) such that
from a vector space to itself (an endomorphism) such that  . That is, whenever is applied twice to any vector, it gives the same result as if it were applied once (i.e. is idempotent). It leaves its image unchanged.[1] This definition of «projection» formalizes and generalizes the idea of graphical projection. One can also consider the effect of a projection on a geometrical object by examining the effect of the projection on points in the object.
. That is, whenever is applied twice to any vector, it gives the same result as if it were applied once (i.e. is idempotent). It leaves its image unchanged.[1] This definition of «projection» formalizes and generalizes the idea of graphical projection. One can also consider the effect of a projection on a geometrical object by examining the effect of the projection on points in the object.
Definitions[edit]
A projection on a vector space  is a linear operator
is a linear operator  such that
such that  .
.
When has an inner product and is complete (i.e. when is a Hilbert space) the concept of orthogonality can be used. A projection on a Hilbert space is called an orthogonal projection if it satisfies  for all
for all  . A projection on a Hilbert space that is not orthogonal is called an oblique projection.
. A projection on a Hilbert space that is not orthogonal is called an oblique projection.
Projection matrix[edit]
The eigenvalues of a projection matrix must be 0 or 1.
Examples[edit]
Orthogonal projection[edit]
For example, the function which maps the point  in three-dimensional space
in three-dimensional space  to the point
to the point  is an orthogonal projection onto the xy-plane. This function is represented by the matrix
is an orthogonal projection onto the xy-plane. This function is represented by the matrix

The action of this matrix on an arbitrary vector is

To see that is indeed a projection, i.e.,  , we compute
, we compute

Observing that  shows that the projection is an orthogonal projection.
shows that the projection is an orthogonal projection.
Oblique projection[edit]
A simple example of a non-orthogonal (oblique) projection is

Via matrix multiplication, one sees that

showing that is indeed a projection.
The projection is orthogonal if and only if  because only then
because only then 
Properties and classification[edit]

The transformation T is the projection along k onto m. The range of T is m and the kernel is k.
Idempotence[edit]
By definition, a projection is idempotent (i.e. ).
Open map[edit]
Every projection is an open map, meaning that it maps each open set in the domain to an open set in the subspace topology of the image.[citation needed] That is, for any vector  and any ball
and any ball  (with positive radius) centered on , there exists a ball
(with positive radius) centered on , there exists a ball  (with positive radius) centered on
(with positive radius) centered on  that is wholly contained in the image
that is wholly contained in the image  .
.
Complementarity of image and kernel[edit]
Let  be a finite-dimensional vector space and be a projection on . Suppose the subspaces
be a finite-dimensional vector space and be a projection on . Suppose the subspaces  and are the image and kernel of respectively. Then has the following properties:
and are the image and kernel of respectively. Then has the following properties:
 is the identity operator on :
is the identity operator on :
- We have a direct sum . Every vector may be decomposed uniquely as with and , and where








The image and kernel of a projection are complementary, as are and  . The operator
. The operator  is also a projection as the image and kernel of become the kernel and image of and vice versa. We say is a projection along onto (kernel/image) and is a projection along onto .
is also a projection as the image and kernel of become the kernel and image of and vice versa. We say is a projection along onto (kernel/image) and is a projection along onto .
Spectrum[edit]
In infinite-dimensional vector spaces, the spectrum of a projection is contained in  as
as

Only 0 or 1 can be an eigenvalue of a projection. This implies that an orthogonal projection is always a positive semi-definite matrix. In general, the corresponding eigenspaces are (respectively) the kernel and range of the projection. Decomposition of a vector space into direct sums is not unique. Therefore, given a subspace , there may be many projections whose range (or kernel) is .
If a projection is nontrivial it has minimal polynomial  , which factors into distinct linear factors, and thus is diagonalizable.
, which factors into distinct linear factors, and thus is diagonalizable.
Product of projections[edit]
The product of projections is not in general a projection, even if they are orthogonal. If two projections commute then their product is a projection, but the converse is false: the product of two non-commuting projections may be a projection.
If two orthogonal projections commute then their product is an orthogonal projection. If the product of two orthogonal projections is an orthogonal projection, then the two orthogonal projections commute (more generally: two self-adjoint endomorphisms commute if and only if their product is self-adjoint).
Orthogonal projections[edit]
When the vector space has an inner product and is complete (is a Hilbert space) the concept of orthogonality can be used. An orthogonal projection is a projection for which the range and the kernel are orthogonal subspaces. Thus, for every and  in ,
in ,  . Equivalently:
. Equivalently:

A projection is orthogonal if and only if it is self-adjoint. Using the self-adjoint and idempotent properties of , for any and in we have  ,
,  , and
, and

where  is the inner product associated with . Therefore, and
is the inner product associated with . Therefore, and  are orthogonal projections.[3] The other direction, namely that if is orthogonal then it is self-adjoint, follows from the implication from
are orthogonal projections.[3] The other direction, namely that if is orthogonal then it is self-adjoint, follows from the implication from  to
to

for every  and
and  in ; thus
in ; thus  .
.
Properties and special cases[edit]
An orthogonal projection is a bounded operator. This is because for every  in the vector space we have, by the Cauchy–Schwarz inequality:
in the vector space we have, by the Cauchy–Schwarz inequality:

Thus  .
.
For finite-dimensional complex or real vector spaces, the standard inner product can be substituted for .
Formulas[edit]
A simple case occurs when the orthogonal projection is onto a line. If  is a unit vector on the line, then the projection is given by the outer product
is a unit vector on the line, then the projection is given by the outer product

(If is complex-valued, the transpose in the above equation is replaced by a Hermitian transpose). This operator leaves u invariant, and it annihilates all vectors orthogonal to , proving that it is indeed the orthogonal projection onto the line containing u.[4] A simple way to see this is to consider an arbitrary vector as the sum of a component on the line (i.e. the projected vector we seek) and another perpendicular to it,  . Applying projection, we get
. Applying projection, we get

by the properties of the dot product of parallel and perpendicular vectors.
This formula can be generalized to orthogonal projections on a subspace of arbitrary dimension. Let  be an orthonormal basis of the subspace , with the assumption that the integer
be an orthonormal basis of the subspace , with the assumption that the integer  , and let
, and let  denote the
denote the  matrix whose columns are , i.e.,
matrix whose columns are , i.e.,  . Then the projection is given by:[5]
. Then the projection is given by:[5]

which can be rewritten as

The matrix  is the partial isometry that vanishes on the orthogonal complement of and is the isometry that embeds into the underlying vector space. The range of
is the partial isometry that vanishes on the orthogonal complement of and is the isometry that embeds into the underlying vector space. The range of  is therefore the final space of . It is also clear that
is therefore the final space of . It is also clear that  is the identity operator on .
is the identity operator on .
The orthonormality condition can also be dropped. If is a (not necessarily orthonormal) basis with , and is the matrix with these vectors as columns, then the projection is:[6][7]

The matrix still embeds into the underlying vector space but is no longer an isometry in general. The matrix  is a «normalizing factor» that recovers the norm. For example, the rank-1 operator
is a «normalizing factor» that recovers the norm. For example, the rank-1 operator  is not a projection if
is not a projection if  After dividing by
After dividing by  we obtain the projection
we obtain the projection  onto the subspace spanned by
onto the subspace spanned by  .
.
In the general case, we can have an arbitrary positive definite matrix  defining an inner product
defining an inner product  , and the projection is given by
, and the projection is given by  . Then
. Then

When the range space of the projection is generated by a frame (i.e. the number of generators is greater than its dimension), the formula for the projection takes the form:  . Here
. Here  stands for the Moore–Penrose pseudoinverse. This is just one of many ways to construct the projection operator.
stands for the Moore–Penrose pseudoinverse. This is just one of many ways to construct the projection operator.
If  is a non-singular matrix and
is a non-singular matrix and  (i.e.,
(i.e.,  is the null space matrix of ),[8] the following holds:
is the null space matrix of ),[8] the following holds:
![{displaystyle {begin{aligned}I&={begin{bmatrix}A&Bend{bmatrix}}{begin{bmatrix}A&Bend{bmatrix}}^{-1}{begin{bmatrix}A^{mathsf {T}}\B^{mathsf {T}}end{bmatrix}}^{-1}{begin{bmatrix}A^{mathsf {T}}\B^{mathsf {T}}end{bmatrix}}\&={begin{bmatrix}A&Bend{bmatrix}}left({begin{bmatrix}A^{mathsf {T}}\B^{mathsf {T}}end{bmatrix}}{begin{bmatrix}A&Bend{bmatrix}}right)^{-1}{begin{bmatrix}A^{mathsf {T}}\B^{mathsf {T}}end{bmatrix}}\&={begin{bmatrix}A&Bend{bmatrix}}{begin{bmatrix}A^{mathsf {T}}A&O\O&B^{mathsf {T}}Bend{bmatrix}}^{-1}{begin{bmatrix}A^{mathsf {T}}\B^{mathsf {T}}end{bmatrix}}\[4pt]&=Aleft(A^{mathsf {T}}Aright)^{-1}A^{mathsf {T}}+Bleft(B^{mathsf {T}}Bright)^{-1}B^{mathsf {T}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d5ac3d05451825c162acf531a9416503f4a580e)
If the orthogonal condition is enhanced to  with non-singular, the following holds:
with non-singular, the following holds:

All these formulas also hold for complex inner product spaces, provided that the conjugate transpose is used instead of the transpose. Further details on sums of projectors can be found in Banerjee and Roy (2014).[9] Also see Banerjee (2004)[10] for application of sums of projectors in basic spherical trigonometry.
Oblique projections[edit]
The term oblique projections is sometimes used to refer to non-orthogonal projections. These projections are also used to represent spatial figures in two-dimensional drawings (see oblique projection), though not as frequently as orthogonal projections. Whereas calculating the fitted value of an ordinary least squares regression requires an orthogonal projection, calculating the fitted value of an instrumental variables regression requires an oblique projection.
A projection is defined by its kernel and the basis vectors used to characterize its range (which is a complement of the kernel). When these basis vectors are orthogonal to the kernel, then the projection is an orthogonal projection. When these basis vectors are not orthogonal to the kernel, the projection is an oblique projection, or just a projection.
A matrix representation formula for a nonzero projection operator[edit]
Let be a linear operator,  such that and assume that is not the zero operator. Let the vectors form a basis for the range of , and assemble these vectors in the matrix . Therefore the integer , otherwise
such that and assume that is not the zero operator. Let the vectors form a basis for the range of , and assemble these vectors in the matrix . Therefore the integer , otherwise  and is the zero operator. The range and the kernel are complementary spaces, so the kernel has dimension
and is the zero operator. The range and the kernel are complementary spaces, so the kernel has dimension  . It follows that the orthogonal complement of the kernel has dimension
. It follows that the orthogonal complement of the kernel has dimension  . Let
. Let  form a basis for the orthogonal complement of the kernel of the projection, and assemble these vectors in the matrix . Then the projection (with the condition ) is given by
form a basis for the orthogonal complement of the kernel of the projection, and assemble these vectors in the matrix . Then the projection (with the condition ) is given by

This expression generalizes the formula for orthogonal projections given above.[11][12] A standard proof of this expression is the following. For any vector in the vector space , we can decompose  , where vector
, where vector  is in the image of , and vector
is in the image of , and vector  So
So  , and then
, and then  is in the kernel of , which is the null space of
is in the kernel of , which is the null space of  In other words, the vector
In other words, the vector  is in the column space of
is in the column space of  so
so  for some dimension vector
for some dimension vector  and the vector satisfies
and the vector satisfies  by the construction of . Put these conditions together, and we find a vector so that
by the construction of . Put these conditions together, and we find a vector so that  . Since matrices and are of full rank by their construction, the
. Since matrices and are of full rank by their construction, the  -matrix
-matrix  is invertible. So the equation gives the vector
is invertible. So the equation gives the vector  In this way,
In this way,  for any vector
for any vector  and hence
and hence  .
.
In the case that is an orthogonal projection, we can take  , and it follows that
, and it follows that  . By using this formula, one can easily check that
. By using this formula, one can easily check that  . In general, if the vector space is over complex number field, one then uses the Hermitian transpose
. In general, if the vector space is over complex number field, one then uses the Hermitian transpose  and has the formula
and has the formula  . Recall that one can define the Moore–Penrose inverse of the matrix by
. Recall that one can define the Moore–Penrose inverse of the matrix by  since has full column rank, so
since has full column rank, so  .
.
Singular values[edit]
Note that is also an oblique projection. The singular values of and can be computed by an orthonormal basis of . Let
 be an orthonormal basis of and let
be an orthonormal basis of and let  be the orthogonal complement of . Denote the singular values of the matrix
be the orthogonal complement of . Denote the singular values of the matrix
 by the positive values
by the positive values  . With this, the singular values for are:[13]
. With this, the singular values for are:[13]

and the singular values for are

This implies that the largest singular values of and are equal, and thus that the matrix norm of the oblique projections are the same.
However, the condition number satisfies the relation  , and is therefore not necessarily equal.
, and is therefore not necessarily equal.
Finding projection with an inner product[edit]
Let be a vector space (in this case a plane) spanned by orthogonal vectors  . Let be a vector. One can define a projection of onto as
. Let be a vector. One can define a projection of onto as

where repeated indices are summed over (Einstein sum notation). The vector can be written as an orthogonal sum such that  .
.  is sometimes denoted as
is sometimes denoted as  . There is a theorem in linear algebra that states that this
. There is a theorem in linear algebra that states that this  is the smallest distance (the orthogonal distance) from to and is commonly used in areas such as machine learning.
is the smallest distance (the orthogonal distance) from to and is commonly used in areas such as machine learning.

y is being projected onto the vector space V.
Canonical forms[edit]
Any projection on a vector space of dimension  over a field is a diagonalizable matrix, since its minimal polynomial divides
over a field is a diagonalizable matrix, since its minimal polynomial divides  , which splits into distinct linear factors. Thus there exists a basis in which has the form
, which splits into distinct linear factors. Thus there exists a basis in which has the form

where  is the rank of . Here
is the rank of . Here  is the identity matrix of size ,
is the identity matrix of size ,  is the zero matrix of size
is the zero matrix of size  , and
, and  is the direct sum operator. If the vector space is complex and equipped with an inner product, then there is an orthonormal basis in which the matrix of P is[14]
is the direct sum operator. If the vector space is complex and equipped with an inner product, then there is an orthonormal basis in which the matrix of P is[14]

where  . The integers
. The integers  and the real numbers
and the real numbers  are uniquely determined. Note that
are uniquely determined. Note that  . The factor
. The factor  corresponds to the maximal invariant subspace on which acts as an orthogonal projection (so that P itself is orthogonal if and only if ) and the -blocks correspond to the oblique components.
corresponds to the maximal invariant subspace on which acts as an orthogonal projection (so that P itself is orthogonal if and only if ) and the -blocks correspond to the oblique components.
Projections on normed vector spaces[edit]
When the underlying vector space  is a (not necessarily finite-dimensional) normed vector space, analytic questions, irrelevant in the finite-dimensional case, need to be considered. Assume now is a Banach space.
is a (not necessarily finite-dimensional) normed vector space, analytic questions, irrelevant in the finite-dimensional case, need to be considered. Assume now is a Banach space.
Many of the algebraic results discussed above survive the passage to this context. A given direct sum decomposition of into complementary subspaces still specifies a projection, and vice versa. If is the direct sum  , then the operator defined by
, then the operator defined by  is still a projection with range and kernel . It is also clear that . Conversely, if is projection on , i.e. , then it is easily verified that
is still a projection with range and kernel . It is also clear that . Conversely, if is projection on , i.e. , then it is easily verified that  . In other words,
. In other words,  is also a projection. The relation implies
is also a projection. The relation implies  and is the direct sum
and is the direct sum  .
.
However, in contrast to the finite-dimensional case, projections need not be continuous in general. If a subspace of is not closed in the norm topology, then the projection onto is not continuous. In other words, the range of a continuous projection must be a closed subspace. Furthermore, the kernel of a continuous projection (in fact, a continuous linear operator in general) is closed. Thus a continuous projection gives a decomposition of into two complementary closed subspaces:  .
.
The converse holds also, with an additional assumption. Suppose is a closed subspace of . If there exists a closed subspace such that X = U ⊕ V, then the projection with range and kernel is continuous. This follows from the closed graph theorem. Suppose xn → x and Pxn → y. One needs to show that  . Since is closed and {Pxn} ⊂ U, y lies in , i.e. Py = y. Also, xn − Pxn = (I − P)xn → x − y. Because is closed and {(I − P)xn} ⊂ V, we have
. Since is closed and {Pxn} ⊂ U, y lies in , i.e. Py = y. Also, xn − Pxn = (I − P)xn → x − y. Because is closed and {(I − P)xn} ⊂ V, we have  , i.e.
, i.e.  , which proves the claim.
, which proves the claim.
The above argument makes use of the assumption that both and are closed. In general, given a closed subspace , there need not exist a complementary closed subspace , although for Hilbert spaces this can always be done by taking the orthogonal complement. For Banach spaces, a one-dimensional subspace always has a closed complementary subspace. This is an immediate consequence of Hahn–Banach theorem. Let be the linear span of . By Hahn–Banach, there exists a bounded linear functional  such that φ(u) = 1. The operator
such that φ(u) = 1. The operator  satisfies , i.e. it is a projection. Boundedness of implies continuity of and therefore
satisfies , i.e. it is a projection. Boundedness of implies continuity of and therefore  is a closed complementary subspace of .
is a closed complementary subspace of .
Applications and further considerations[edit]
Projections (orthogonal and otherwise) play a major role in algorithms for certain linear algebra problems:
- QR decomposition (see Householder transformation and Gram–Schmidt decomposition);
- Singular value decomposition
- Reduction to Hessenberg form (the first step in many eigenvalue algorithms)
- Linear regression
- Projective elements of matrix algebras are used in the construction of certain K-groups in Operator K-theory
As stated above, projections are a special case of idempotents. Analytically, orthogonal projections are non-commutative generalizations of characteristic functions. Idempotents are used in classifying, for instance, semisimple algebras, while measure theory begins with considering characteristic functions of measurable sets. Therefore, as one can imagine, projections are very often encountered in the context of operator algebras. In particular, a von Neumann algebra is generated by its complete lattice of projections.
Generalizations[edit]
More generally, given a map between normed vector spaces  one can analogously ask for this map to be an isometry on the orthogonal complement of the kernel: that
one can analogously ask for this map to be an isometry on the orthogonal complement of the kernel: that  be an isometry (compare Partial isometry); in particular it must be onto. The case of an orthogonal projection is when W is a subspace of V. In Riemannian geometry, this is used in the definition of a Riemannian submersion.
be an isometry (compare Partial isometry); in particular it must be onto. The case of an orthogonal projection is when W is a subspace of V. In Riemannian geometry, this is used in the definition of a Riemannian submersion.
See also[edit]
- Centering matrix, which is an example of a projection matrix.
- Dykstra’s projection algorithm to compute the projection onto an intersection of sets
- Invariant subspace
- Least-squares spectral analysis
- Orthogonalization
- Properties of trace
Notes[edit]
- ^ Meyer, pp 386+387
- ^ a b Horn, Roger A.; Johnson, Charles R. (2013). Matrix Analysis, second edition. Cambridge University Press. ISBN 9780521839402.
- ^ Meyer, p. 433
- ^ Meyer, p. 431
- ^ Meyer, equation (5.13.4)
- ^ Banerjee, Sudipto; Roy, Anindya (2014), Linear Algebra and Matrix Analysis for Statistics, Texts in Statistical Science (1st ed.), Chapman and Hall/CRC, ISBN 978-1420095388
- ^ Meyer, equation (5.13.3)
- ^ See also Linear least squares (mathematics) § Properties of the least-squares estimators.
- ^ Banerjee, Sudipto; Roy, Anindya (2014), Linear Algebra and Matrix Analysis for Statistics, Texts in Statistical Science (1st ed.), Chapman and Hall/CRC, ISBN 978-1420095388
- ^ Banerjee, Sudipto (2004), «Revisiting Spherical Trigonometry with Orthogonal Projectors», The College Mathematics Journal, 35 (5): 375–381, doi:10.1080/07468342.2004.11922099, S2CID 122277398
- ^ Banerjee, Sudipto; Roy, Anindya (2014), Linear Algebra and Matrix Analysis for Statistics, Texts in Statistical Science (1st ed.), Chapman and Hall/CRC, ISBN 978-1420095388
- ^ Meyer, equation (7.10.39)
- ^ Brust, J. J.; Marcia, R. F.; Petra, C. G. (2020), «Computationally Efficient Decompositions of Oblique Projection Matrices», SIAM Journal on Matrix Analysis and Applications, 41 (2): 852–870, doi:10.1137/19M1288115, OSTI 1680061, S2CID 219921214
- ^ Doković, D. Ž. (August 1991). «Unitary similarity of projectors». Aequationes Mathematicae. 42 (1): 220–224. doi:10.1007/BF01818492. S2CID 122704926.
References[edit]
- Banerjee, Sudipto; Roy, Anindya (2014), Linear Algebra and Matrix Analysis for Statistics, Texts in Statistical Science (1st ed.), Chapman and Hall/CRC, ISBN 978-1420095388
- Dunford, N.; Schwartz, J. T. (1958). Linear Operators, Part I: General Theory. Interscience.
- Meyer, Carl D. (2000). Matrix Analysis and Applied Linear Algebra. Society for Industrial and Applied Mathematics. ISBN 978-0-89871-454-8.
External links[edit]
- MIT Linear Algebra Lecture on Projection Matrices on YouTube, from MIT OpenCourseWare
- Linear Algebra 15d: The Projection Transformation on YouTube, by Pavel Grinfeld.
- Planar Geometric Projections Tutorial – a simple-to-follow tutorial explaining the different types of planar geometric projections.
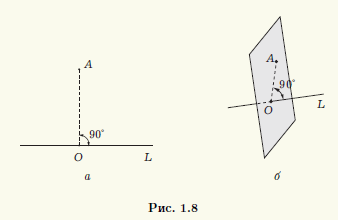
Пусть на плоскости заданы прямая L и точка A. Опустим из точки A на прямую L перпендикуляр (рис. 1.8, а). Тогда его основание (точку O) называют ортогональной проекцией точки A на прямую L. Если прямая L и точка A заданы в пространстве, то в этом случае ортогональной проекцией точки A на прямую L называют точку O пересечения прямой L с перпендикулярной ей плоскостью, проходящей через точку A (рис. 1.8, б). Если точка A лежит на прямой L, то она совпадает со своей ортогональной проекцией на L.
Для вектора — AB (на плоскости или в пространстве) можно построить ортогональные проекции на прямую L его начала и конца (рис. 1.9). Вектор OAOB, соединяющий эти проекции OA и OB и лежащий на прямой L, называют ортогональной проекцией вектора AB на прямую L.
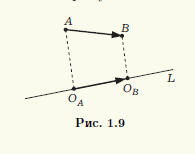
Прямую, на которой задано одно из двух возможных направлений, называют осью. Выбранное направление на оси изображают с помощью стрелки на соответствующем конце оси. Ортогональную проекцию OAOB вектора AB на ось l можно полностью описать длиной вектора OAOB, приписав ей знак,
указывающий направление вектора. Если направление OAOB совпадает с заданным направлением оси, то берут знак плюс, а если направление вектора противоположно направлению оси, то берут знак минус. Длину вектора OAOB со знаком, определяющим направление этого вектора, называют ортогональной проекцией вектора AB на ось l и обозначают прlа.
Обратим внимание на то, что ортогональной проекцией вектора на ось является число, в то время как ортогональная проекция вектора на прямую — это вектор. Чтобы вектору соответствовало число как его проекция, на прямой нужно выбрать одно из двух возможных направлений.
Каждый ненулевой вектор l однозначно определяет ось: его можно рассматривать расположенным на некоторой прямой и задающим на ней направление. Ортогональную проекцию вектора на такую ось называют ортогональной проекцией этого вектора на направление вектора l.
Угол между направлениями двух ненулевых векторов называют углом между этими векторами. Угол может изменяться в пределах от 0 до π. Крайние значения 0 и π отвечают коллинеарным векторам, соответственно однонаправленным и противоположно направленным. Если хотя бы один из двух векторов является нулевым, то угол между такими векторами не определен. Удобно, однако, считать, что в этом случае угол имеет произвольное значение. Так, нулевой вектор коллинеарен любому другому, что формально соответствует углу 0 (или π). Конкретное значение, приписываемое углу между нулевым вектором и каким-либо другим, выбирают исходя из ситуации.
Теорема 1.1. Ортогональная проекция вектора а на направление ненулевого вектора l равна длине |а|, умноженной на косинус угла φ между векторами а и l, т.е.
прl = а|а| cos
где — угол между векторами а и l
◄ Пусть вектор l лежит на прямой L, а его началом является точка A. Совместим начало вектора а с точкой A, и пусть его концом будет точка B (рис. 1.10). Построим ортогональную проекцию C точки B на прямую L. Тогда вектор AC является ортогональной проекцией вектора а = AB на прямую L.
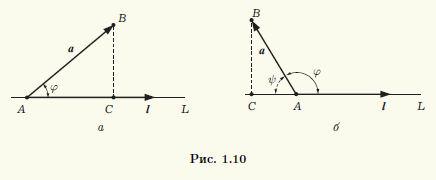
Если угол φ между векторами а и l острый (как это показано на рис. 1.10, а), то конец вектора l и точка C лежат по одну сторону от точки A. В этом случае проекция а на направление вектора l равна длине |AC| = |AB| cosφ катета AC треугольника ABC.
Если угол φ тупой (см. рис. 1.10, б), то конец вектора l и точка C лежат по разные стороны от точки A. Это значит, что векторы AC и l имеют противоположные направления, а проекция вектора а равна — |AC|. В треугольнике ABC угол ψ, прилежащий к катету AC, равен π — φ, поэтому |AC| = |AB| cos( π — φ) = — |AB| cosφ.
Если же φ = π/2 или а = 0, то точка C совпадает с точкой A и вектор AC является нулевым вектором. Однако cosπ/2 = 0, следовательно, и в этом случае утверждение теоремы справедливо. ►
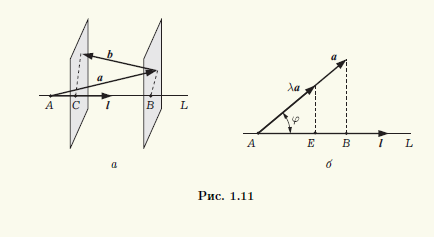
Теорема 1.2. Ортогональная проекция суммы векторов на направление ненулевого вектора равна сумме их ортогональных проекций на направление этого вектора, а при умножении вектора на число его ортогональная проекция на направление ненулевого вектора умножается на то же число:
прl(а + b) = прlа + прlb, прl(λа) — λпрlа.
◄ Доказательство следует из рис. 1.11. В случае, изображенном на рис. 1.11, а, имеем прlа = |AB|, прlb = -|BC|, прl(а + b) = |AC| = |AB| — |BC|. В случае, изображенном на рис. 1.11, б, прlа = |AB| и, если λ > 0, прl(λа) = |AE| = λ|AB|. Остальные варианты (точка C не принадлежит отрезку AB в случае а, λ ≤ 0 в случае б) рассматриваются аналогично. ►