Ядро и образ линейного отображения
Ядром линейного отображения называется множество таких векторов
, что
, т.е. множество векторов из
, которые отображаются в нулевой вектор пространства
. Ядро отображения
обозначается:
Образом линейного отображения называется множество образов
всех векторов
из
. Образ отображения
обозначается
или
Заметим, что символ следует отличать от
— мнимой части комплексного числа.
Примеры ядер и образов линейных отображений
1. Ядром нулевого отображения является все пространство
, а образом служит один нулевой вектор, т.е.
2. Рассмотрим отображение , которое ставит в соответствие каждому вектору
n-мерного линейного пространства
его координатный столбец
относительно заданного базиса
. Ядром этого отображения является нулевой вектор
пространства
, поскольку только этот вектор имеет нулевой координатный столбец
. Образ преобразования
совпадает со всем пространством
, так как это преобразование сюръективно (любой столбец из
является координатным столбцом некоторого вектора пространства
).
3. Рассмотрим отображение , которое каждому вектору
n-мерного евклидова пространства
ставит в соответствие алгебраическое значение
его проекции на направление, задаваемое единичным вектором
. Ядром этого преобразования является ортогональное дополнение
— множество векторов, ортогональных
. Образом является все множество действительных чисел
.
4. Рассмотрим отображение , которое каждому многочлену степени не выше
ставит в соответствие его производную. Ядром этого отображения является множество
многочленов нулевой степени, а образом — все пространство
.
Свойства ядра и образа линейного отображения
1. Ядро любого линейного отображения является подпространством:
.
В соответствии с определением требуется доказать, что множество является непустым и замкнутым относительно операций сложения векторов и умножения вектора на число. В самом деле, из однородности отображения следует, что
т.е. нулевой вектор отображается в нулевой вектор
. Следовательно, ядро любого линейного отображения не является пустым и содержит, по крайней мере, нулевой элемент:
. Покажем, что множество
замкнуто по отношению к операциям сложения векторов и умножения вектора на число. Действительно:
Следовательно, множество является линейным подпространством пространства
.
2. Образ любого линейного отображения является подпространством:
.
В самом деле, докажем, например, замкнутость множества по отношению к операции умножения вектора на число. Если
, то существует вектор
такой, что
. Тогда
, то есть
.
Поскольку ядро и образ линейного отображения являются линейными подпространствами (свойства 1 и 2), можно говорить об их размерностях.
Дефектом линейного отображения называется размерность его ядра: , а рангом линейного отображения — размерность его образа:
.
3. Ранг линейного отображения равен рангу его матрицы (определенной относительно любых базисов).
В самом деле, если любой базис пространства
, то
. Поэтому максимальное число линейно независимых векторов системы
(ранг системы векторов) равно максимальному числу линейно независимых столбцов матрицы
отображения, т.е. рангу матрицы:
.
4. Линейное отображение инъективно тогда и только тогда, когда
, другими словами, когда дефект отображения равен нулю:
.
Действительно, образом нулевого вектора служит нулевой вектор
. Поэтому, если отображение инъективно, то ядро содержит только нулевой вектор
, иначе два разных вектора имели бы один и тот же образ
. Обратно, при условии
разные векторы
не могут иметь одинаковые образы
, так как в этом случае из равенств
, следует, что ненулевой вектор
(приходим к противоречию).
5. Линейное отображение сюръективно тогда и только тогда, когда
, другими словами, когда ранг отображения равен размерности пространства образов:
.
6. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда
и
одновременно.
Теорема (9.1) о размерностях ядра и образа. Сумма размерностей ядра и образа любого линейного отображения равна размерности пространства прообразов:
(9.3)
Действительно, пусть . Выберем в подпространстве
базис
и дополним его векторами
до базиса
всего пространства
. Покажем, что векторы
образуют базис подпространства
.
Во-первых, , так как образ любого вектора
линейно выражается через векторы
Во-вторых, образующие линейно независимы. Если их линейная комбинация равна нулевому вектору:
то вектор принадлежит ядру (его образ — нулевой вектор). Однако, по построению этот вектор принадлежит алгебраическому дополнению
. Учитывая, что
, заключаем:
. Получили разложение нулевого вектора по линейно независимой системе
векторов, значит, все коэффициенты
. Поэтому равенство
справедливо только для тривиальной линейной комбинации, т.е. система векторов
линейно независимая.
Таким образом, векторы образуют базис подпространства
, а его размерность определяется количеством базисных векторов, т.е.
, что равносильно (9.3).
Следствие. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда обратима его матрица (определенная относительно любых базисов).
Действительно, для обратимости преобразования (см. свойство 6) его матрица
(размеров
) должна удовлетворять условиям (см. свойства 3,4,5):
Тогда по теореме 9.1 заключаем, что , т.е. матрица
— квадратная n-го порядка и невырожденная
, что и требовалось доказать.
Обратимые линейные отображения называются также невырожденными (имея в виду невырожденность их матрицы).
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Решение. Очевидно,
что данное линейное преобразование
действует
![]()
,
т.к. умножение матриц
![]()
определено, когда количество столбцов
1-й матрицы равно количеству строк
второго вектора (в нашем случае 4), а
полученная матрица имеет размерность
![]()
(т.к. в матрице A
5 строк).
Совокупность N
векторов x
таких, что Ax=0,
называется ядром
преобразования A.
Совокупность M
векторов вида Ax,
когда x
пробегает все R
(в нашем случае
![]()
)
называется образом
пространства
R
при преобразовании A
(другими
словами образ – множество векторов y,
для которых уравнение Ax=y
имеет хотя бы одно решение).
1) Находим ядро.
Пусть
![]()
— вектор столбец. Решаем систему уравнений

.
Решаем систему
методом Гаусса

.
Переменные
![]()
— базисные, а
![]()
— небазисная.
Находим все
фундаментальные решения. В нашем случае
оно одно: положив
![]()
,
получаем
![]()
— который и будет образовывать базис
ядра (т.к. все вектора вида
![]()
отображаются в 0). Размерность базиса
равна 1.
2) Находим образ.
Пусть
— вектор столбец. Решаем систему уравнений
Ax=y.
Для того, чтобы
вектор
![]()
принадлежал образу, необходимо и
достаточно, чтобы ранг матрицы А, и ранг
расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 3, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
.
Находим фундаментальные
решения (базис образа). Т.к. определитель
из коэффициентов при
![]()
:
![]()
,
то
![]()
— базисные, а
![]()
— небазисные.
1-е фундаментальное
решение. Положим
![]()
,
находим решение системы

— первое базисное
решение.
2-е фундаментальное
решение. Положим
![]()
,
находим решение системы

— второе базисное
решение.
3-е фундаментальное
решение. Положим
![]()
,
находим решение системы

— второе базисное
решение.
Итак, размерность
образа равна 3, базис – вектора
![]()
.
(Видно, что
размерность образа + размерность ядра
= размерности пространства R4).
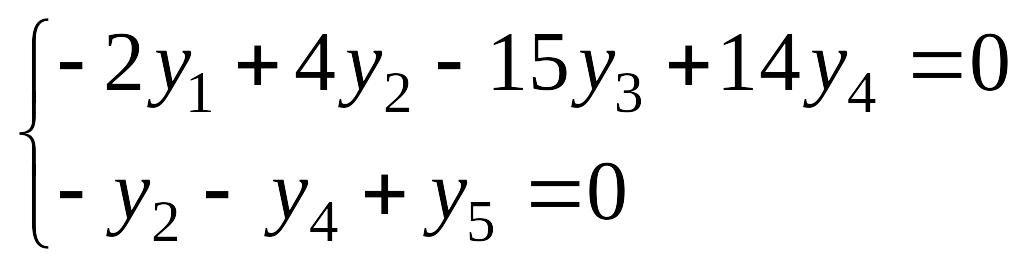
7. Найти размерность пространства и , где , а м – пространство решений системы уравнений .
Решение.
![]()
— ядро,
![]()
— образ. Преобразование
![]()
.
1) Находим ядро.
Решаем систему уравнений

Следовательно,
одно базисное решение
![]()
— базис ядра. Размерность
![]()
.
2) Находим образ.
Пусть
![]()
— вектор столбец. Решаем систему уравнений
Ax=y.
Для того, чтобы
вектор
![]()
принадлежал образу, необходимо и
достаточно, чтобы ранг матрицы А, и ранг
расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 2, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
![]()
Отсюда,
![]()
—
базисная, а
![]()
не базисные переменные.
1-е фундаментальное
решение:
![]()
.
2-е фундаментальное
решение:
![]()
.
Следовательно,
![]()
— базис образа. Размерность
![]()
.
3) Находим
ортогональное дополнение
![]()
.
Т.к. любой вектор
![]()
,
перпендикулярен любому вектору из
,
то заключаем, что скалярное произведение

— фундаментальное
решение системы или базис
![]()
.
4) Найдем базис
линейной оболочки векторов
![]()
,
![]()
.
Т.к.

,
то заключаем, что
,
— базис в
,
и следовательно, размерность
![]()
.
5) Находим пространство
решений системы уравнений
.

— фундаментальное
решение системы или базис M.
6) Находим
ортогональное дополнение
![]()
.
Т.к. любой вектор
![]()
,
перпендикулярен любому вектору из
![]()
,
то заключаем, что скалярное произведение
![]()
.
Отсюда,
![]()
—
базисная, а
![]()
не базисные переменные.
1-е фундаментальное
решение:
![]()
.
2-е фундаментальное
решение:
![]()
.
Следовательно,
![]()
— базис
.
Размерность
![]()
.
7) Найдем базис
линейной оболочки векторов
,
,
,
.
Очевидно, что
![]()
,
а
,
— базис в
,
и следовательно, размерность
![]()
.
8. Пусть U
— подпространство
линейного пространства R4,
являющееся линейной оболочкой. векторов
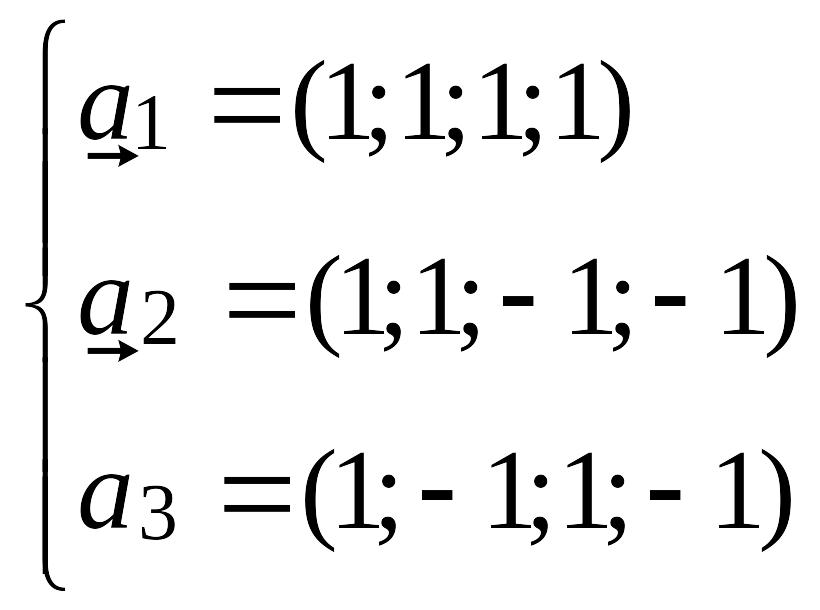
,
V
— подпространство
линейного пространства R4
являющееся
линейной оболочкой векторов

.
Найдите: базис U
+ V
и
базис
![]()
.
Решение.
1) Находим базис в
U.

rang=3
, сл-но,
![]()
— базис U.
1) Находим базис в
V.

rang=3
, сл-но,
![]()
— базис V.
3) Находим базис в
U
+ V.
Находим линейно
независимые вектора в объединении
![]()
.

![]()
,
а вектора
![]()
— базис U
+ V
, а размерность
dim(U
+ V)=4.
4) Найдем общие
вектора в U
и
V
.
Нам известно, что
в конечномерном пространстве
подпространства могут быть заданы
системами линейных уравнений. Тогда их
пересечение задаётся системой уравнений,
полученной объединением систем, задающих
подпространства.
Система уравнений
задающая U:
Для того, чтобы
вектор
принадлежал линейной оболочке U,
необходимо и достаточно, чтобы ранг
матрицы А и ранг расширенной матрицы
(A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

Т.к. rang(A)
= 3, то для того чтобы rang(A|y)
=3, необходимо и достаточно, чтобы
![]()
— искомая система
линейных уравнений.
Система уравнений
задающая V:
Для того, чтобы
вектор
принадлежал линейной оболочке U,
необходимо и достаточно, чтобы ранг
матрицы А и ранг расширенной матрицы
(A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

Т.к.
rang(A)
= 3, то для того чтобы rang(A|y)
=3, необходимо и достаточно, чтобы
![]()
— искомая система
линейных уравнений.
Решаем общую
систему:

.
Отсюда фундаментальные
решения (которые получаются при
![]()
и при
![]()
),
а следовательно базис
есть:
![]()
.
9. Подпространство
L1
в R4
порождено векторами (1;-4;6;7) и (0;1;-3;1), а
подпространство L2
— векторами
(0;1;-4;5) и (1;-4;7;-11). Постройте базисы следующих
подпространств: пересечения
![]()
и ортогонального дополнения к сумме
![]()
.
Решение.
1) Находим базис в
L1.
Т.к. матрица, составленная из координат
векторов
![]()
,
имеет ранг=2 (т.к. в ней есть определитель
второго порядка
![]()
),
то заключаем, что вектора
![]()
=(1;-4;6;7)
и
![]()
=(0;1;-3;1)
линейно независимые и образуют базис
в L1.
2) Аналогично,
заключаем, что вектора
![]()
=(0;1;-4;5)
и
![]()
=(1;-4;7;-11)
линейно независимые и образуют базис
в L2.
3) Находим базис
L1+
L2.
Рассматриваем
объединенную систему векторов
=(1;-4;6;7),
=(0;1;-3;1),
=(0;1;-4;5),
=(1;-4;7;-11)
и находим среди
них линейно независимые. Находим ранг
матрицы, столбцами которой являются
координаты
![]()
:

.
Ранг = 4, следовательно,
все вектора
— линейно независимые и образуют базис
в L1+
L2.
4)
Находим базис ортогонального дополнения
.
Каждый вектор из
![]()
ортогонален любому вектору из L1+
L2.
Следовательно, скалярные произведения
на вектора базиса из L1+
L2
равны 0. Получаем однородную систему
![]()
.
Т.к. определитель
системы не равен 0 (показано выше, что
ранг=4), то система имеет единственное
тривиальное решение
![]()
.
Следовательно,
состоит
только из одного вектора
![]()
.
(Это и так было
видно, т.к. линейная оболочка
![]()
,
ибо 4 линейно независимых вектора
образуют базис в
![]()
,
а
![]()
).
5) Находим систему
уравнений описывающую L1.
Для того, чтобы
вектор
принадлежал линейной оболочке
,
необходимо и достаточно, чтобы ранг
матрицы А – составленной из координат
векторов
,
и ранг расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 2, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
![]()
— искомая система
линейных уравнений.
Находим систему
уравнений описывающую L2.
Для того, чтобы
вектор
принадлежал линейной оболочке
,
необходимо и достаточно, чтобы ранг
матрицы А – составленной из координат
векторов
,
и ранг расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 2, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
![]()
— искомая система
линейных уравнений.
Решаем общую
систему:
![]()
Т.к. определитель
матрицы коэффициентов
![]()
,
то система имеет единственное решение
![]()
.
Следовательно,
состоит из
одного вектора (0;0;0;0).
(Это и так было
видно, т.к. вектора
— линейно независимые,
линейные оболочки
![]()
и
![]()
не имеют общих (кроме нулевого) векторов,
т.к. линейная комбинация векторов
![]()
не может дать вектора
![]()
,
а следовательно и их линейные комбинации).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Матрица линейного оператора примеры
Построение матрицы по заданной формуле отображения.
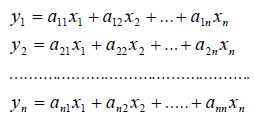
Пусть отображение задано с помощью формулы:

то есть для координат произвольного исходного вектора определены координаты его образа. Тогда, рассматривая вместо произвольного вектора x вектор  , найдём его образ, это будет вектор
, найдём его образ, это будет вектор  . Для этого в формуле, задающей образ вектора, полагаем
. Для этого в формуле, задающей образ вектора, полагаем  ,
,  ,…,
,…,  . Аналогично находим образы для
. Аналогично находим образы для  ,…,
,…,  . Из координат образа вектора
. Из координат образа вектора  составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
Пример 1. Пусть оператор задан с помощью формулы:
 .
.
Прежде всего, докажем, что это отображение – действительно линейный оператор.
Отобразим сумму векторов:
 Теперь каждую координату получившегося вектора можем преобразовать:
Теперь каждую координату получившегося вектора можем преобразовать:



 .
.
Аналогично для умножения на константу:


Для того чтобы найти матрицу этого линейного оператора, нужно, как было сказано выше, подставить значения x1 = 1, x2 = 0, а затем x1 = 0, x2 = 1. В этом примере образы базисных векторов – соответственно (3, 1) и (2, -1).
Поэтому матрица линейного оператора будет иметь вид:
 .
.
Аналогичным способом решается задача и для 3 и большего количества переменных.
Пример 2.  .
.
Построим матрицу оператора. Отображая вектор (1,0,0), получаем (1,4,-1), соответственно (0,1,0) переходит в (2,1,-2), а вектор (0,0,1) – в (-1,1,3).
Матрица линейного оператора:
 .
.
2.2. Построение матрицы оператора в случае, когда известен исходный базис и система векторов, в которую он отображается.
Если задана система  из n векторов, образующих базис, и какая-нибудь произвольная система n векторов
из n векторов, образующих базис, и какая-нибудь произвольная система n векторов  (возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
(возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
Матрицу этого оператора можно найти двумя способами: с помощью обратной матрицы и с помощью системы уравнений.
Пусть  – матрица оператора в базисе
– матрица оператора в базисе  . По условию,
. По условию,  для всех индексов
для всех индексов  . Данные n равенств можно записать в виде одного матричного равенства:
. Данные n равенств можно записать в виде одного матричного равенства:  , при этом столбцы матрицы
, при этом столбцы матрицы  – это векторы , а столбцы матрицы
– это векторы , а столбцы матрицы  – векторы . Тогда матрица может быть найдена в виде
– векторы . Тогда матрица может быть найдена в виде  .
.
Пример. Найти матрицу линейного оператора, отображающего базис
 в систему векторов
в систему векторов  .
.
Здесь  ,
,  ,
,  , и получаем:
, и получаем:
 .
.
Проверка осуществляется умножением получившейся матрицы на каждый вектор:  .
.
Аналогично решаются подобные задачи и для трёхмерного пространства. В приложении (§5) есть несколько вариантов таких задач.
2.3. Прочие способы нахождения матрицы оператора.
Существуют также примеры, где линейный оператор задаётся другими способами, отличными от рассмотренных в п. 2.1 и 2.2.
Пример. Линейными операторами являются как правое, так и левое векторное умножение на фиксированный вектор в трёхмерном пространстве, то есть отображения вида  и
и  . Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
. Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
 .
.
Аналогично,  ,
,
 .
.
Координаты полученных векторов запишем в виде столбцов матрицы оператора.
Матрица оператора:  .
.
Аналогично можно построить матрицу линейного оператора :
 .
.
Пример. Линейный оператор дифференцирования в пространстве всех многочленов степени не более n. Это пространство размерности n + 1. Возьмём в качестве базиса элементы  ,
,  ,
,  ,…,
,…,  .
.
 ,
,  ,
,  , аналогично получим
, аналогично получим  ,…,
,…,  .
.
Матрица этого линейного оператора:
Линейные операторы могут отображать не только пространства конечной размерности, но и бесконечномерные пространства. Так, оператор дифференцирования может рассматриваться также в пространстве всех непрерывных функций. (В этом пространстве нет конечного базиса). В этом случае, очевидно, оператор не может быть задан матрицей конечного порядка.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студента самое главное не сдать экзамен, а вовремя вспомнить про него. 10219 –  | 7588 –
| 7588 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Матрица линейного оператора
Определение 1. Если задан закон, который каждому вектору x?? ставит в соот ветствие вектор y . то говорят, что в линейном пространстве ? задан оператор A , при этом пишут:
Определение 2. Оператор A называется линейным, если для любых x 1 ?? и x 2 ?? и произвольного числа ? выполняются условия:
Рассмотрим теперь в евклидовом пространстве E n базис e 1 ,e 2 . e n и пусть в этом пространстве определён линейный оператор A : y = A x .
Разложим векторы x и y по базису e 1 ,e 2 . e n :

В силу линейности оператора A можно написать
Заметим, что каждый вектор  , следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.
, следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.


В силу единственности разложения по данному базису мы можем при равнять коэффициенты при базисных векторах в правых частях формул (1) и (2); тогда получим:
Получили, что линейному оператору A в данном базисе соответствует квадратная матрица
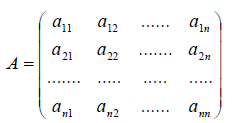
которая называется матрицей линейного оператора A , i -й столбец которой состоит из координат вектора Ae i (i = 1,2. n ) относительно данного базиса. Отметим, что матрица A оператора A зависит от выбора базиса e 1 ,e 2 . e n .
Итак, мы показали, что всякому линейному оператору A в евклидовом пространстве E n соответствует матрица A ; можно доказать и обратное утверждение: всякую квадратную матрицу A можно рассматривать как матрицу некоторого линейного оператора A в данном базисе e 1 ,e 2 . e n .
Представляют интерес невырожденные линейные операторы, т.е. такие операторы, матрицы которых имеют обратную A -1 , т.е. также являются невырожденными. В этом случае каждому вектору y (образу), определённому соотношением, отвечает единственный вектор x (прообраз) и при этом имеет место матричное равенство: X = A -1 ? Y .
Примеры линейных операторов
1. В пространстве 2-мерных векторов линейным оператором является правило
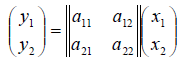
связывающее вектор-прообраз  с вектором-образом
с вектором-образом 
2. В пространстве бесконечно дифференцируемых функций линейным оператором является операция дифференцирования, ставящая в соответствие каждому элементу этого простран ства его производную функцию.
3. В пространстве многочленов P n (t) линейным оператором является операция умножения многочлена на независимую переменную t .
Пример: Известны образы базисных векторов E 3 под действием оператора A :
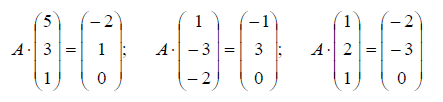
Найти матрицу этого оператора в исходном базисе.
Решение: По определению y = A x, значит в матричном виде можно записать, что A = X -1 Y . Для нашего примера получаем

Действия над операторами
Сложение линейных операторов. Пусть x?E n , A и B – два линейных оператора в этом пространстве.
Определение 1. Суммой линейных операторов A и B в E n называется оператор C, определяемый равенством Cx = A x + Bx , где x – любой вектор из E n .
Сумма линейных операторов является линейным оператором, причём его матрица C = A + B, где A и B – матрицы линейных операторов A и B .
Умножение линейного оператора на число. Пусть x?E n , линейный оператор A определён в E n , ? – некоторое число.
Определение 2. Произведением линейного оператора A на число ? называется оператор ?A , определяемый равенством  .
.
?A является линейным оператором, а матрица этого линейного оператора получается из матрицы A умножением её на число ? , т.е. она равна ? ? A.
Умножение линейных операторов. Пусть x? E n , y ? E n , z ? E n и кроме того в E n определены линейные операторы A и B таким образом, что y = Bx, z = A y .
Определение 3. Произведением A ? B линейных операторов A и B называется оператор C, определяемый соотношением Cx = A (Bx) .
Таким образом, перемножение линейных операторов состоит в последовательном их применении по отношению к вектору x .
Рассмотрим матрицы – столбцы:
и обозначим через A, B и C – соответственно матрицы линейных операторов A, B и C. Тогда Z = A ? (B ? X) = (A ? B) ? X = C ? X , таким образом, C = A ? B, т.е. матрица произведения линей ных операторов также является линейным оператором.
a) (A ? B)(x + y) = A (B(x + y)) = A (Bx + By) = A (Bx) + A (By) = = (A ? B) ? x + (A ? B) ? y
б) (A ? B)(? x) = A (B(? x)) = A (?Bx) =?A (Bx) =? (A ? B)x
Свойства умножения линейных операторов вытекают из свойств умножения матриц.
Определение 4. Линейные операторы A и В называются равными, если 
 . Равенство операторов обозначается как A = B .
. Равенство операторов обозначается как A = B .
Определение 5. Оператор E называется единичным (или тождественным) оператором, если каждому элементу x линейного пространства  он ставит в соответствие тот же самый элемент, то есть
он ставит в соответствие тот же самый элемент, то есть 
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида  , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
, сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы  и
и  соответственно. Пусть задано отображение
соответственно. Пусть задано отображение
где A – m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
 |
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
 |
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
Сделаем следующее обозначение:
 |
(6) |
Тогда равенство (5) примет следующий вид:
 |
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2. m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2. n с коэффициентами aij i=1,2. m; j=1,2. n.
Построим матрицу A с элементами aij:
 |
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B – mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej= Aej+ Bej= | n | (aij+bij) ej |
| ∑ | ||
| j= 1 |
Следовательно оператору C отвечает матрица  ,где i=1,2. m, j=1,2. n, т.е.
,где i=1,2. m, j=1,2. n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
Ядро и образ линейного отображения
Ядром линейного отображения называется множество таких векторов , что , т.е. множество векторов из , которые отображаются в нулевой вектор пространства . Ядро отображения обозначается:
Образом линейного отображения называется множество образов всех векторов из . Образ отображения обозначается или
Заметим, что символ следует отличать от — мнимой части комплексного числа.
Примеры ядер и образов линейных отображений
1. Ядром нулевого отображения является все пространство , а образом служит один нулевой вектор, т.е.
2. Рассмотрим отображение , которое ставит в соответствие каждому вектору n-мерного линейного пространства его координатный столбец относительно заданного базиса . Ядром этого отображения является нулевой вектор пространства , поскольку только этот вектор имеет нулевой координатный столбец . Образ преобразования совпадает со всем пространством , так как это преобразование сюръективно (любой столбец из является координатным столбцом некоторого вектора пространства ).
3. Рассмотрим отображение , которое каждому вектору n-мерного евклидова пространства ставит в соответствие алгебраическое значение его проекции на направление, задаваемое единичным вектором . Ядром этого преобразования является ортогональное дополнение — множество векторов, ортогональных . Образом является все множество действительных чисел .
4. Рассмотрим отображение , которое каждому многочлену степени не выше ставит в соответствие его производную. Ядром этого отображения является множество многочленов нулевой степени, а образом — все пространство .
Свойства ядра и образа линейного отображения
1. Ядро любого линейного отображения является подпространством: .
В соответствии с определением требуется доказать, что множество является непустым и замкнутым относительно операций сложения векторов и умножения вектора на число. В самом деле, из однородности отображения следует, что
т.е. нулевой вектор отображается в нулевой вектор . Следовательно, ядро любого линейного отображения не является пустым и содержит, по крайней мере, нулевой элемент: . Покажем, что множество замкнуто по отношению к операциям сложения векторов и умножения вектора на число. Действительно:
Следовательно, множество является линейным подпространством пространства .
2. Образ любого линейного отображения является подпространством: .
В самом деле, докажем, например, замкнутость множества по отношению к операции умножения вектора на число. Если , то существует вектор такой, что . Тогда , то есть .
Поскольку ядро и образ линейного отображения являются линейными подпространствами (свойства 1 и 2), можно говорить об их размерностях.
Дефектом линейного отображения называется размерность его ядра: , а рангом линейного отображения — размерность его образа: .
3. Ранг линейного отображения равен рангу его матрицы (определенной относительно любых базисов).
В самом деле, если любой базис пространства , то . Поэтому максимальное число линейно независимых векторов системы (ранг системы векторов) равно максимальному числу линейно независимых столбцов матрицы отображения, т.е. рангу матрицы: .
4. Линейное отображение инъективно тогда и только тогда, когда , другими словами, когда дефект отображения равен нулю: .
Действительно, образом нулевого вектора служит нулевой вектор . Поэтому, если отображение инъективно, то ядро содержит только нулевой вектор , иначе два разных вектора имели бы один и тот же образ . Обратно, при условии разные векторы не могут иметь одинаковые образы , так как в этом случае из равенств , следует, что ненулевой вектор (приходим к противоречию).
5. Линейное отображение сюръективно тогда и только тогда, когда , другими словами, когда ранг отображения равен размерности пространства образов: .
6. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда и одновременно.
Теорема (9.1) о размерностях ядра и образа. Сумма размерностей ядра и образа любого линейного отображения равна размерности пространства прообразов:
Действительно, пусть . Выберем в подпространстве базис и дополним его векторами до базиса всего пространства . Покажем, что векторы образуют базис подпространства .
Во-первых, , так как образ любого вектора линейно выражается через векторы
Во-вторых, образующие линейно независимы. Если их линейная комбинация равна нулевому вектору:
то вектор принадлежит ядру (его образ — нулевой вектор). Однако, по построению этот вектор принадлежит алгебраическому дополнению . Учитывая, что , заключаем: . Получили разложение нулевого вектора по линейно независимой системе векторов, значит, все коэффициенты . Поэтому равенство справедливо только для тривиальной линейной комбинации, т.е. система векторов линейно независимая.
Таким образом, векторы образуют базис подпространства , а его размерность определяется количеством базисных векторов, т.е. , что равносильно (9.3).
Следствие. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда обратима его матрица (определенная относительно любых базисов).
Действительно, для обратимости преобразования (см. свойство 6) его матрица (размеров ) должна удовлетворять условиям (см. свойства 3,4,5):
Тогда по теореме 9.1 заключаем, что , т.е. матрица — квадратная n-го порядка и невырожденная , что и требовалось доказать.
Обратимые линейные отображения называются также невырожденными (имея в виду невырожденность их матрицы).
Линейные операторы
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы и соответственно. Пусть задано отображение
где A — m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
|
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
|
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
Сделаем следующее обозначение:
|
(6) |
Тогда равенство (5) примет следующий вид:
|
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2. m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2. n с коэффициентами aij i=1,2. m; j=1,2. n.
Построим матрицу A с элементами aij:
|
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B — mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej= Aej+ Bej= | n | (aij+bij) ej |
| ∑ | ||
| j= 1 |
Следовательно оператору C отвечает матрица ,где i=1,2. m, j=1,2. n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
http://mathhelpplanet.com/static.php?p=yadro-i-obraz-linyeinogo-otobrazheniya
http://matworld.ru/linear-algebra/linear-operator.php
Как найти размерность матрицы
Матрица записывается в виде прямоугольной таблицы, состоящей из некоторого количества строк и столбцов, на пересечении которых располагаются элементы матрицы. Основное математическое применение матриц – решение систем линейных уравнений.
Число столбцов и строк задают размерность матрицы. К примеру, таблица размерностью 5×6 имеет 5 строк и 6 столбцов. В общем случае, размерность матрицы записывается в виде m×n, где число m указывает на количество строк, n – столбцов.
Размерность матрицы важно учитывать при совершении алгебраических операций. Например, складывать можно матрицы только одного и того же размера. Операция сложения матриц с разной размерностью не определена.
Если массив имеет размерность m×n, его можно умножить на массив n×l. Число столбцов первой матрицы должно равняться числу строк второй, иначе операция умножения не будет определена.
Размерность матрицы указывает на число уравнений в системе и количество переменных. Число строк совпадает с количеством уравнений, а за каждым столбцом закреплена своя переменная. Решение системы линейных уравнений «записано» в действиях над матрицами. Благодаря матричной системе записи становится возможным решать системы высоких порядков.
Если число строк равно числу столбцов, матрица называется квадратной. В ней можно выделить главную и побочную диагонали. Главная идет от левого верхнего угла к правому нижнему, побочная – от правого верхнего к левому нижнему.
Массивы размерностью m×1 или 1×n являются векторами. Также в виде вектора можно представить любую строку и любой столбец произвольной таблицы. Для таких матриц определены все операции над векторами.
Поменяв в матрице A строки и столбцы местами, можно получить транспонированную матрицу A(Т). Таким образом, при транспонировании размерность m×n перейдет в n×m.
В программировании для прямоугольной таблицы задается два индекса, один из которых пробегает длину всей строки, другой – длину всего столбца. При этом цикл для одного индекса помещен внутрь цикла для другого, за счет чего обеспечивается последовательное прохождение всей размерности матрицы.
Все курсы > Линейная алгебра > Занятие 6 (часть 1)
Сегодня мы еще раз рассмотрим полученные ранее знания о векторных пространствах, линейных преобразованиях, системе линейных уравнений и определителе матрицы в контексте новых понятий ранга и четырех фундаментальных подпространств матрицы, а именно пространства столбцов, пространства строк, ядра и коядра матрицы.
Продолжим работать в том же ноутбуке⧉
Ранг матрицы
При нулевом определителе в трехмерном пространстве матрица может «схлопнуть» пространство до плоскости, линии или точки (во всех трех случаях определитель равен нулю).
Ранее мы сказали, что для того чтобы в системе уравнений, например, трехмерная матрица $A$ при нулевом определителе все же имела решение, вектор $mathbf b$, на который матрица $A$ переводит вектор $mathbf x$, должен лежать на плоскости или линии, в которые «схлопывается» трехмерное пространство.
Размерность пространства после трансформации принято описывать рангом матрицы (rank).
Если преобразование трехмерной матрицы «сворачивает» размерность до линии, то ранг такого преобразования равен единице, до плоскости — двум и т.д. В случае матрицы $2 times 2$ самый высокий ранг матрицы — два. Это значит, что при преобразовании размерность сохранилась (и соответственно определитель не равен нулю).
Пространство столбцов
Пространством столбцов (column space, а также образом, image) называют множество всех возможных линейных комбинаций вектор-столбцов.
С точки зрения линейных преобразований, пространством столбцов называют векторы, которые определяют пространство после трансформации.
В случае линейно зависимых векторов таких векторов будет меньше, чем в исходной матрице. Приведем пример линейно зависимых векторов и рассчитаем ранг матрицы.
|
M = np.array([[1, 0, 1], [2, 3, 4], [—1, —3, —3]]) np.linalg.matrix_rank(M) |
Приведем матрицу к упрощенному ступенчатому виду (reduced row-echelon form) с помощью Питона. Для этого воспользуемся методом .rref() библиотеки sympy.
|
from sympy import * M = Matrix([[1, 0, 1], [2, 3, 4], [—1, —3, —3]]) M_rref = M.rref() M_rref[0] |
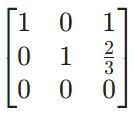
Как мы видим, с одной стороны, пространство сократилось до двух измерений (поэтому ранг матрицы равен двум), с другой, двумерное пространство можно описать первыми двумя столбцами (их еще называют разрещающими, ведущими или базисными, pivot columns), где все элементы кроме одного равны нулю.
Разрешающие столбцы и образуют пространство столбцов. Найдем пространство столбцов с помощью Питона.
|
# вторым элементом метод .rref() выводит # индексы разрешающих столбцов (pivot columns), # используем их для нахождения пространства столбцов M.col(M.rref()[1]) |

|
# то же самое можно найти с помощью # метода .columnspace() M_columnspace = M.columnspace() M_columnspace[0] |

Откуда такое название? Столбцы матрицы говорят куда «приземлятся» координаты базисных векторов. В этом смысле, оболочка вектор-столбцов то же самое, что и пространство столбцов.
В матрице $2 times 2$ первый столбец показывает, где окажется вектор $mathbf i$, второй — вектор $mathbf j$. И оболочка этих столбцов определит пространство столбцов. Если, например, в матрице $2 times 2$ столбцы линейно независимы и преобразование не приводит к снижению размерности, то пространство столбцов задается этими двумя векторами.
Замечу, что столбцы, не являющиеся разрешающими, называются свободными (free).
Ядро матрицы
Если преобразование уменьшает размерность (например, преобразовывает плоскость в линию), то несколько векторов оказываются в начале координат (становятся нулевыми векторами). Видео ниже прекрасно иллюстрирует эту трансформацию.
Множество таких «исчезающих» векторов называется ядром матрицы или ее нуль-пространством (null space, kernel).

Видео про обратные матрицы, ранг и ядро⧉.
Система уравнений
$Ax = b$
Рассмотрим пространство столбцов и ядро с точки зрения системы линейных уравнений. В первую очередь представим пространство столбцов, как решение системы $ A mathbf x = mathbf b $, т.е. линейную комбинацию вектор-столбцов $A$, умноженных на компоненты $mathbf x$.
$$ x_1 begin{bmatrix} vdots \ mathbf a_1 \ vdots end{bmatrix} + x_2 begin{bmatrix} vdots \ mathbf a_2 \ vdots end{bmatrix} + x_3 begin{bmatrix} vdots \ mathbf a_3 \ vdots end{bmatrix} = begin{bmatrix} vdots \ mathbf b \ vdots end{bmatrix} $$
Всегда ли $A mathbf x = mathbf b$ будет иметь решение? Нет. Возьмем некоторую матрицу $A$ и соответствующие ей векторы $mathbf x$ и $mathbf b$.
$$ begin{bmatrix} 1 & 1 & 2 \ 2 & 1 & 3 \ 3 & 1 & 4 \ 4 & 1 & 5 end{bmatrix} begin{bmatrix} x_1 \ x_2 \ x_3 end{bmatrix} = begin{bmatrix} b_1 \ b_2 \ b_3 \ b_4 end{bmatrix} $$
В такой системе будет много векторов $mathbf b$, которые не будут являться линейной комбинацией трех столбцов матрицы A.

В каком случае такое решение все-таки будет существовать? Если $mathbf b$ будет являться линейной комбинацией векторов $A$, т.е. будет находиться в пространстве столбцов $A$, $mathbf b in col(A) $.

Например, если $mathbf b$ будет равен одному из столбцов $A$.
$$ begin{bmatrix} 1 & 1 & 2 \ 2 & 1 & 3 \ 3 & 1 & 4 \ 4 & 1 & 5 end{bmatrix} begin{bmatrix} x_1 \ x_2 \ x_3 end{bmatrix} = begin{bmatrix} 1 \ 2 \ 3 \ 4 end{bmatrix} $$
Тогда решением может быть
$$ mathbf x = begin{bmatrix} 1 \ 0 \ 0 end{bmatrix} $$
Что интересно, все возможные решения $mathbf x$ именно такой системы $A mathbf x = mathbf b$, где $mathbf b in col(A) $ сами по себе не образуют векторное пространство (хотя бы потому что нулевой вектор не включен в эти решения).
Дополнительно замечу, что так как в матрице $A$ только два линейно независимых вектора (третий вектор является суммой первых двух), то в данном случае мы имеем двумерное подпространство $R^4$.
$Ax = 0$
В системе линейных уравнений $A mathbf x = mathbf b$, если $mathbf b$ — нулевой вектор, т.е. $A mathbf x = mathbf 0$, то ядро дает все возможные решения этой системы (все возможные $mathbf x$). Можно также сказать, что ядро $mathbf x $ представляет собой комбинацию вектор-столбцов $A$, обращающихся в ноль.
$$ x_1 begin{bmatrix} vdots \ mathbf a_1 \ vdots end{bmatrix} + x_2 begin{bmatrix} vdots \ mathbf a_2 \ vdots end{bmatrix} + x_3 begin{bmatrix} vdots \ mathbf a_3 \ vdots end{bmatrix} = begin{bmatrix} vdots \ mathbf 0 \ vdots end{bmatrix} $$
В примере выше обратите внимание, что $col(A) in R^4$, в то время как $null(A) in R^3$. Решением же этой системы при нулевом векторе $mathbf b$, $A mathbf x = mathbf 0$ будет
$$ null(A) = k begin{bmatrix} 1 \ 1 \ -1 end{bmatrix} $$
где $k in mathbb{R} $. Другими словами, $null(A)$ представляет собой линию в $R^3$.
Убедимся, что для матрицы $M$ выше мы правильно нашли ядро (а также решение $M mathbf x = 0$).
|
M = np.array([[1, 0, 1], [2, 3, 4], [—1, —3, —3]]) Null = np.array([—1, —2/3, 1]) M @ Null |
Общее и частное решение
Приведем общее решение (complete solution) следующей системы, состоящее из частного решения (particular solution) системы $A mathbf x = mathbf b$ и ядра, то есть решения $A mathbf x = mathbf 0$.
$$ begin{bmatrix} 1 & 1 & 2 \ 2 & 1 & 3 \ 3 & 1 & 4 \ 4 & 1 & 5 end{bmatrix} begin{bmatrix} x_1 \ x_2 \ x_3 end{bmatrix} = begin{bmatrix} 1 \ 2 \ 3 \ 4 end{bmatrix} $$
$$ mathbf x = begin{bmatrix} 1 \ 0 \ 0 end{bmatrix} + k begin{bmatrix} 1 \ 1 \ -1 end{bmatrix} $$
Независимость векторов, базис и размерность
В свете новых знаний еще раз рассмотрим линейную независимость векторов и базис векторного пространства. Возьмем некоторую матрицу $A$.
Независимые вектор-столбцы
Можно сказать, что вектор-столбцы, образующие матрицу $A$ независимы, если ядро матрицы состоит только из нулевого вектора, $null(A) = { mathbf 0 }$ (решением $A mathbf x = mathbf 0$ будет только нулевой вектор $mathbf x$). Одновременно все столбцы такой матрицы являются разрешающими, и матрица имеет полный ранг, равный количеству столбцов $n$, $rank(A) = n$.
Если матрица $А$ квадратная и ее столбцы линейно независимы, то можно сказать, что
- Вектор-столбцы матрицы образуют базис $R^n$
- Такая матрица будет обратима (!)
Приведем примеры обратимых матриц, столбцы которых формируют базис.
$$ begin{bmatrix} 1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 end{bmatrix}, begin{bmatrix} 1 & 2 & 3 \ 1 & 2 & 1 \ 2 & 5 & 8 end{bmatrix} $$
|
A = np.array([[1, 2, 3], [1, 2, 1], [2, 5, 8]]) np.linalg.matrix_rank(A) |
|
array([[ 5.5, -0.5, -2. ], [-3. , 1. , 1. ], [ 0.5, -0.5, 0. ]]) |
Зависимые вектор-столбцы
Если же столбцы зависимы, то ядро матрицы содержит также ненулевые векторы и решением $A mathbf x = mathbf 0$ будет или будут некоторые ненулевые векторы $mathbf x$. Столбцы матрицы будут как разрешающими, так и свободными. Ранг матрицы будет равен количеству разрещающих столбцов.
Базис пространства будет определяться именно линейно независимыми векторами, входящими в пространство столбцов. Размерностью (dimension) векторного пространства будет как раз количество векторов базиса.
Например, возьмем следующую матрицу $A$.
$$ A = begin{bmatrix} 1 & 2 & 3 & 1 \ 1 & 1 & 2 & 1 \ 1 & 2 & 3 & 1 end{bmatrix} $$
В данном случае у матрицы два линейно независимых столбца. В частности, это
$$ col(A) = left{ begin{bmatrix} 1 \ 1 \ 1 end{bmatrix}, begin{bmatrix} 2 \ 1 \ 2 end{bmatrix} right} $$
Как следствие,
$$ dim(col(A)) = rank(A) = dim(basis) = text{# of pivots} = 2 $$
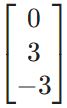
Одновременно, нулевое пространство задано векторами
$$ null(A) = left{ begin{bmatrix} -1 \ -1 \ 1 \ 0 end{bmatrix}, begin{bmatrix} -1 \ 0 \ 0 \ 1 end{bmatrix} right} $$
Как следствие,
$$ dim(null(A)) = text{# of free columns} = 2 $$
Код на Питоне для нахождения пространства столбцов и ядра приведен в ноутбуке к занятию⧉.
В качестве дополнения, замечу, что размерность векторного пространства характеризуется следом (trace) единичной матрицы этого пространства или суммой элементов главной диагонали. Например, размерность $R^3$ можно охарактеризовать через
$$ dim(col(A)) = tr left( begin{bmatrix} 1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 end{bmatrix} right) = 3 $$
Пространство строк и коядро
Пространством строк (row space) называют множество всех возможных линейных комбинаций вектор-строк.
Если матрицу транспонировать, то можно сказать, что
$$ row(A) = col(A^T) $$
Коядром или левым нуль-пространством (left null-space, cokernel) матрицы $A$ будет ядро матрицы $A^T$.
$$ leftnull(A) = null(A^T) $$
Продемонстрируем, почему это пространством называется именно левым нуль-пространством. По определению ядра, как решения $A mathbf x = mathbf 0$, можно сказать, что коядро будет решением $A^T mathbf y = mathbf 0$.
$$ A^T mathbf y = mathbf 0 $$
$$ mathbf y^T(A^T)^T = mathbf 0^T $$
$$ mathbf y^T A = mathbf 0^T $$
Схематично это можно представить следующим образом.

Можно также сказать, что коядро $ mathbf y $ в системе $ A^T mathbf y = mathbf 0 $ дает все возможные комбинации столбцов $A^T$, обращающиеся в нулевой вектор (что то же самое, что линейные комбинации строк $mathbf x^T A = 0$). Приведем пример. Найдем коядро матрицы $A$.
|
A = Matrix([[1, 2, 3, 1], [1, 1, 2, 1], [1, 2, 3, 1]]) A.T.nullspace()[0] |

Другими словами, нам нужно взять $-1R_1 + 0R_2 + 1R_3$, чтобы получить нулевой вектор. Проверим полученный результат.
|
A = np.array([[1, 2, 3, 1], [1, 1, 2, 1], [1, 2, 3, 1]]) Leftnull = np.array([—1, 0, 1]) Leftnull.T @ A |
Фундаментальные подпространства матрицы
Обобщим изложенную выше информацию. Возьмем матрицу $A$ размерностью $m times n$. Тогда
- $ null(A) in R^n$ (так как должно быть решением $A mathbf x = mathbf 0$)
- $ col(A) in R^m $ (количество строк $A$)
- $ row(A) = col(A^T) in R^n $ (количество столбцов $A$)
- $ leftnull(A) = null(A^T) in R^m $ (так как должно быть решением $A^T mathbf y = mathbf 0$)
Тогда схематично эти подпространства можно представить следующим образом.

Несколько пояснений и дополнений:
- $r$ означает ранг (rank) матрицы
- $r+(n-r) = n$, т.е. столбцы матрицы $A$
- $r+(m-r) = m$, т.е. строки матрицы $A$ или столбцы $A^T$
Про пересечение подпространств. Может ли вектор $mathbf v = begin{bmatrix} 1 \ 2 end{bmatrix}$ быть одновременно в нуль-пространстве и являться частью пространства строк A (или в целом строкой в A)? Нет.
$$ begin{bmatrix} 1 & 2 \ dots & dots end{bmatrix} begin{bmatrix} 1 \ 2 end{bmatrix} not= begin{bmatrix} 0 \ 0 end{bmatrix} $$
Пересечением пространства строк и нуль-пространства будет только нулевой вектор.
$$ row(A) cap null(A) = { mathbf 0 } $$
Ортогональность подпространств матрицы
Более того, ядро ортогонально пространству строк $row(A) perp null(A)$, так как их скалярное произведение равно нулю. Это следует из определения ядра $A mathbf x = mathbf 0$ (произведение $mathbf x$ на каждую вектор-строку $mathbf a_m$ равно нулю).
$$ begin{bmatrix} dots & mathbf a_1 & dots \ dots & mathbf a_2 & dots \ dots & dots & dots \ dots & mathbf a_m & dots end{bmatrix} begin{bmatrix} vdots \ mathbf x \ vdots end{bmatrix} = begin{bmatrix} 0 \ 0 \ 0 \ 0 end{bmatrix} $$
Более того, так как $null(A)$ содержит все векторы, ортогональные $row(A)$, то ядро можно считать ортогональным дополнением пространства строк в $R^n$: $null(A) = row(A)^{perp} $.
То же самое справедливо для пространства столбцов и коядра.
$$ col(A) perp leftnull(A) perp null(A^T) text{ в } R^m $$
$$ leftnull(A), null(A^T) = col(A)^{perp} $$
Количество решений системы уравнений
Систематизируем наши знания о подпространствах матрицы с точки зрения возможного количества решений системы уравнений.
Система не имеет решений
В случае если система не имеет решений, существует некоторый вектор $mathbf b $, при котором $A mathbf x = mathbf b $ не будет иметь решения.
$$ exists mathbf b implies A mathbf x not= mathbf b $$
С точки зрения матрицы $underset{m times n}{A}$, можно говорить о том, что некоторые строки линейно зависимы и после преобразования методом Гаусса обратятся в нули. Как следствие, ранг матрицы меньше количества строк, $r < m$.

Система имеет единственное решение
Если мы знаем, что система имеет единственное решение, то это означает, что нуль-пространство матрицы $A$ содержит только нулевой вектор, $null(A) = { mathbf 0 }$ и все столбцы линейно независимы, $ r = n $.

Система имеет множество решений
В этом случае решение состоит из частного решения и решения системы $A mathbf x not= mathbf 0 $. Другими словами, это означает, что нуль-пространство содержит не только нулевой вектор, а значит столбцы матрицы линейно зависимы и $ r < n $.

Теперь приведем пример, иллюстрирующий применение матрицы для моделирования физического процесса, а также посмотрим как подпространства такой матрицы одновременно характеризуют свойства этого процесса.