Асламазов Л.Г. Движение по окружности // Квант. — 1972. — № 9. — С. 51-57.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
Для описания движения по окружности наряду с линейной скоростью вводят понятие угловой скорости. Если точка при движении по окружности за время Δt описывает дугу, угловая мера которой Δφ, то угловая скорость  .
.
Угловая скорость ω связана с линейной скоростью υ соотношением υ = ω·r, где r — радиус окружности, по которой движется точка (рис. 1). Понятие угловой скорости особенно удобно для описания вращения твердого тела вокруг оси. Хотя линейные скорости у точек, находящихся на разном расстоянии от оси, будут неодинаковыми, их угловые скорости будут равны, и можно говорить об угловой скорости вращения тела в целом.

Рис. 1.
Задача 1. Диск радиуса r катится без проскальзывания по горизонтальной плоскости. Скорость центра диска постоянная и равна υп. С какой угловой скоростью при этом вращается диск?
Каждая точка диска участвует в двух движениях — в поступательном движении со скоростью υп вместе с центром диска и во вращательном движении вокруг центра с некоторой угловой скоростью ω.
Для нахождения ω воспользуемся отсутствием проскальзывания, то есть тем, что в каждый момент времени скорость точки диска, соприкасающейся с плоскостью, равна нулю. Это означает, что для точки А (рис. 2) скорость поступательного движения υп равна по величине и противоположна по направлению линейной скорости вращательного движения υвр = ω·r. Отсюда сразу получаем  .
.
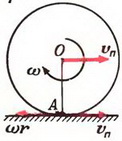
Рис. 2.
Задача 2. Найти скорости точек В, С и D того же диска (рис. 3).

Рис. 3.
Рассмотрим вначале точку В. Линейная скорость ее вращательного движения направлена вертикально вверх и равна  , то есть по величине равна скорости поступательного движения, которая, однако, направлена горизонтально. Складывая векторно эти две скорости, находим, что результирующая скорость υB по величине равна
, то есть по величине равна скорости поступательного движения, которая, однако, направлена горизонтально. Складывая векторно эти две скорости, находим, что результирующая скорость υB по величине равна  и образует угол 45º с горизонтом. У точки С скорости вращательного и поступательного движения направлены в одну сторону. Результирующая скорость υC равна 2υп и направлена горизонтально. Аналогично находится и скорость точки D (см. рис. 3).
и образует угол 45º с горизонтом. У точки С скорости вращательного и поступательного движения направлены в одну сторону. Результирующая скорость υC равна 2υп и направлена горизонтально. Аналогично находится и скорость точки D (см. рис. 3).
Даже в том случае, когда скорость точки, движущейся по окружности, не меняется по величине, точка имеет некоторое ускорение, так как меняется направление вектора скорости. Это ускорение называется центростремительным. Оно направлено к центру окружности и равно  (R — радиус окружности, ω и υ — угловая и линейная скорости точки).
(R — радиус окружности, ω и υ — угловая и линейная скорости точки).
Если же скорость точки, движущейся по окружности, меняется не только по направлению, но и по величине, то наряду с центростремительным ускорением существует и так называемое тангенциальное ускорение. Оно направлено по касательной к окружности и равно отношению  (Δυ — изменение величины скорости за время Δt).
(Δυ — изменение величины скорости за время Δt).
Задача 3. Найти ускорения точек А, В, С и D диска радиуса r, катящегося без проскальзывания по горизонтальной плоскости. Скорость центра диска постоянна и равна υп (рис. 3).
В системе координат, связанной с центром диска, диск вращается с угловой скоростью ω, а плоскость движется поступательно со скоростью υп. Проскальзывание между диском и плоскостью отсутствует, следовательно,  . Скорость поступательного движения υп не меняется, поэтому угловая скорость вращения диска постоянная и точки диска имеют только центростремительное ускорение
. Скорость поступательного движения υп не меняется, поэтому угловая скорость вращения диска постоянная и точки диска имеют только центростремительное ускорение  , направленное к центру диска. Так как система координат движется без ускорения (с постоянной скоростью υп), то в неподвижной системе координат ускорения точек диска будут теми же.
, направленное к центру диска. Так как система координат движется без ускорения (с постоянной скоростью υп), то в неподвижной системе координат ускорения точек диска будут теми же.
Перейдем теперь к задачам на динамику вращательного движения. Вначале рассмотрим простейший случай, когда движение по окружности происходит с постоянной скоростью. Так как ускорение тела при этом направлено к центру, то и векторная сумма всех сил, приложенных к телу, должна быть тоже направлена к центру, и по II закону Ньютона  .
.
Следует помнить, что в правую часть этого уравнения входят только реальные силы, действующие на данное тело со стороны других тел. Никакой центростремительной силы при движении по окружности не возникает. Этим термином пользуются просто для обозначения равнодействующей сил, приложенных к телу, движущемуся по окружности. Что касается центробежной силы, то она возникает только при описании движения по окружности в неинерциальной (вращающейся) системе координат. Мы пользоваться здесь понятием центростремительной и центробежной силы вообще не будем.
Задача 4. Определить наименьший радиус закругления дороги, которое автомобиль может пройти при скорости υ = 70 км/ч и коэффициенте трения шин о дорогу k =0,3.
На автомобиль действуют сила тяжести Р = m·g, сила реакции дороги N и сила трения Fтp между шинами автомобиля и дорогой. Силы Р и N направлены вертикально и равны по величине: P = N. Сила трения, препятствующая проскальзыванию («заносу») автомобиля, направлена к центру поворота и сообщает центростремительное ускорение:  . Максимальное значение силы трения Fтр max = k·N = k·m·g, поэтому минимальное значение радиуса окружности, по которой еще возможно движение со скоростью υ, определяется из уравнения
. Максимальное значение силы трения Fтр max = k·N = k·m·g, поэтому минимальное значение радиуса окружности, по которой еще возможно движение со скоростью υ, определяется из уравнения  . Отсюда
. Отсюда  (м).
(м).
Сила реакции дороги N при движении автомобиля по окружности не проходит через центр тяжести автомобиля. Это связано с тем, что ее момент относительно центра тяжести должен компенсировать момент силы трения, стремящийся опрокинуть автомобиль. Величина силы трения тем больше, чем больше скорость автомобиля  . При некотором значении скорости момент силы трения превысит момент силы реакции и автомобиль опрокинется.
. При некотором значении скорости момент силы трения превысит момент силы реакции и автомобиль опрокинется.
Задача 5. При какой скорости автомобиль, движущийся по дуге окружности радиуса R = 130 м, может опрокинуться? Центр тяжести автомобиля находится на высоте h = 1 м над дорогой, ширина следа автомобиля l = 1,5 м (рис. 4).
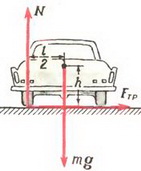
Рис. 4.
В момент опрокидывания автомобиля как сила реакции дороги N, так и сила трения Fтp приложены к «внешнему» колесу. При движении автомобиля по окружности со скоростью υ на него действует сила трения . Эта сила создает момент относительно центра тяжести автомобиля  . Максимальный момент силы реакции дороги N = m·g относительно центра тяжести равен
. Максимальный момент силы реакции дороги N = m·g относительно центра тяжести равен  (в момент опрокидывания сила реакции проходит через внешнее колесо). Приравнивая эти моменты, найдем уравнение для максимальной скорости, при которой автомобиль еще не опрокинется:
(в момент опрокидывания сила реакции проходит через внешнее колесо). Приравнивая эти моменты, найдем уравнение для максимальной скорости, при которой автомобиль еще не опрокинется:
![]()
Откуда  ≈ 30 м/с ≈ 110 км/ч.
≈ 30 м/с ≈ 110 км/ч.
Чтобы автомобиль мог двигаться с такой скоростью, необходим коэффициент трения  (см. предыдущую задачу).
(см. предыдущую задачу).
Аналогичная ситуация возникает при повороте мотоцикла или велосипеда. Сила трения, создающая центростремительное ускорение, имеет момент относительно центра тяжести, стремящийся опрокинуть мотоцикл. Поэтому для компенсации этого момента моментом силы реакции дороги мотоциклист наклоняется в сторону поворота (рис. 5).
Задача 6. Мотоциклист едет по горизонтальной дороге со скоростью υ = 70 км/ч, делая поворот радиусом R = 100 м. На какой угол α к горизонту он должен при этом наклониться, чтобы не упасть?
Сила трения между мотоциклом и дорогой , так как она сообщает мотоциклисту центростремительное ускорение. Сила реакции дороги N = m·g. Условие равенства моментов силы трения и силы реакции относительно центра тяжести дает уравнение: Fтp·l·sin α = N·l·cos α, где l — расстояние ОА от центра тяжести до следа мотоцикла (см. рис. 5).
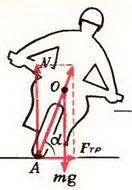
Рис. 5.
Подставляя сюда значения Fтp и N, находим что ![]() или
или  . Отметим, что равнодействующая сил N и Fтp при этом угле наклона мотоцикла проходит через центр тяжести, что и обеспечивает равенство нулю суммарного момента сил N и Fтp.
. Отметим, что равнодействующая сил N и Fтp при этом угле наклона мотоцикла проходит через центр тяжести, что и обеспечивает равенство нулю суммарного момента сил N и Fтp.
Для того, чтобы увеличить скорость движения по закруглению дороги, участок дороги на повороте делают наклонным. При этом в создании центростремительного ускорения, кроме силы трения, участвует и сила реакции дороги.
Задача 7. С какой максимальной скоростью υ может двигаться автомобиль по наклонному треку с углом наклона α при радиусе закругления R и коэффициенте трения шин о дорогу k?
На автомобиль действуют сила тяжести m·g, сила реакции N, направленная перпендикулярно плоскости трека, и сила трения Fтp, направленная вдоль трека (рис. 6).
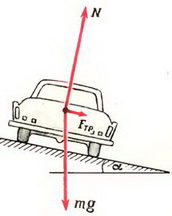
Рис. 6.
Так как нас не интересуют в данном случае моменты сил, действующих на автомобиль, мы нарисовали все силы приложенными к центру тяжести автомобиля. Векторная сумма всех сил должна быть направлена к центру окружности, по которой движется автомобиль, и сообщать ему центростремительное ускорение. Поэтому сумма проекций сил на направление к центру (горизонтальное направление) равна  , то есть
, то есть
![]()
Сумма проекций всех сил на вертикальное направление равна нулю:
N·cos α – m·g – Fтp·sin α = 0.
Подставляя в эти уравнения максимальное возможное значение силы трения Fтp = k·N и исключая силу N, находим максимальную скорость  , с которой еще возможно движение по такому треку. Это выражение всегда больше значения
, с которой еще возможно движение по такому треку. Это выражение всегда больше значения  , соответствующего горизонтальной дороге.
, соответствующего горизонтальной дороге.
Разобравшись с динамикой поворота, перейдем к задачам на вращательное движение в вертикальной плоскости.
Задача 8. Автомобиль массы m = 1,5 т движется со скоростью υ = 70 км/ч по дороге, показанной на рисунке 7. Участки дороги АВ и ВС можно считать дугами окружностей радиуса R = 200 м, касающимися друг друга в точке В. Определить силу давления автомобиля на дорогу в точках А и С. Как меняется сила давления при прохождении автомобилем точки В?
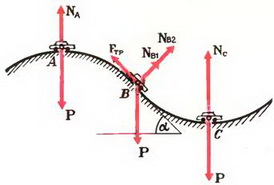
Рис. 7.
В точке А на автомобиль действуют сила тяжести Р = m·g и сила реакции дороги NA. Векторная сумма этих сил должна быть направлена к центру окружности, то есть вертикально вниз, и создавать центростремительное ускорение:  , откуда
, откуда  (Н). Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе реакции. В точке С векторная сумма сил направлена вертикально вверх:
(Н). Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе реакции. В точке С векторная сумма сил направлена вертикально вверх:  и
и  (Н). Таким образом, в точке А сила давления меньше силы тяжести, а в точке С — больше.
(Н). Таким образом, в точке А сила давления меньше силы тяжести, а в точке С — больше.
В точке В автомобиль переходит с выпуклого участка дороги на вогнутый (или наоборот). При движении по выпуклому участку проекция силы тяжести на направление к центру должна превышать силу реакции дороги NB1, причем  . При движении по вогнутому участку дороги, наоборот, сила реакции дороги NВ2 превосходит проекцию силы тяжести:
. При движении по вогнутому участку дороги, наоборот, сила реакции дороги NВ2 превосходит проекцию силы тяжести:  .
.
Из этих уравнений получаем, что при прохождении точки В сила давления автомобиля на дорогу меняется скачком на величину  ≈ 6·103 Н. Разумеется, такие ударные нагрузки действуют разрушающе как на автомобиль, так и на дорогу. Поэтому дороги и мосты всегда стараются делать так, чтобы их кривизна менялась плавно.
≈ 6·103 Н. Разумеется, такие ударные нагрузки действуют разрушающе как на автомобиль, так и на дорогу. Поэтому дороги и мосты всегда стараются делать так, чтобы их кривизна менялась плавно.
При движении автомобиля по окружности с постоянной скоростью сумма проекций всех сил на направление, касательное к окружности, должна быть равна нулю. В нашем случае касательная составляющая силы тяжести уравновешивается силой трения между колесами автомобиля и дорогой.
Величина силы трения регулируется вращательным моментом, прикладываемым к колесам со стороны мотора. Этот момент стремится вызвать проскальзывание колес относительно дороги. Поэтому возникает сила трения, препятствующая проскальзыванию и пропорциональная приложенному моменту. Максимальное значение силы трения равно k·N, где k — коэффициент трения между шинами автомобиля и дорогой, N — сила давления на дорогу. При движении автомобиля вниз сила трения играет роль тормозящей силы, а при движении вверх, наоборот, роль силы тяги.
Задача 9. Автомобиль массой m = 0,5 т, движущийся со скоростью υ = 200 км/ч, совершает «мертвую петлю» радиуса R = 100 м (рис. 8). Определить силу давления автомобиля на дорогу в верхней точке петли А; в точке В, радиус-вектор которой составляет угол α = 30º с вертикалью; в точке С, в которой скорость автомобиля направлена вертикально. Возможно ли движение автомобиля по петле с такой постоянной скоростью при коэффициенте трения шин о дорогу k = 0,5?
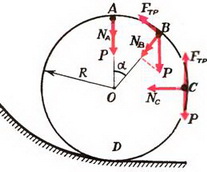
Рис. 8.
В верхней точке петли сила тяжести и сила реакции дороги NA направлены вертикально вниз. Сумма этих сил создает центростремительное ускорение:  . Поэтому
. Поэтому  Н.
Н.
Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе NА.
В точке В центростремительное ускорение создается суммой силы реакции и проекции силы тяжести на направление к центру:  . Отсюда
. Отсюда  Н.
Н.
Легко видеть, что NB > NA; с увеличением угла α сила реакции дороги увеличивается.
В точке С сила реакции  Н; центростремительное ускорение в этой точке создается только силой реакции, а сила тяжести направлена по касательной. При движении по нижней части петли сила реакции будет превышать
Н; центростремительное ускорение в этой точке создается только силой реакции, а сила тяжести направлена по касательной. При движении по нижней части петли сила реакции будет превышать  и максимальное значение
и максимальное значение  Н сила реакции имеет в точке D. Значение
Н сила реакции имеет в точке D. Значение ![]() , таким образом, является минимальным значением силы реакции.
, таким образом, является минимальным значением силы реакции.
Скорость автомобиля будет постоянной, если касательная составляющая силы тяжести не превышает максимальной силы трения k·N во всех точках петли. Это условие заведомо выполняется, если минимальное значение  превосходит максимальное значение касательной составляющей силы веса. В нашем случае это максимальное значение равно m·g (оно достигается в точке С), и условие
превосходит максимальное значение касательной составляющей силы веса. В нашем случае это максимальное значение равно m·g (оно достигается в точке С), и условие  выполняется при k = 0,5, υ = 200 км/ч, R = 100 м.
выполняется при k = 0,5, υ = 200 км/ч, R = 100 м.
Таким образом, в нашем случае движение автомобиля по «мертвой петле» с постоянной скоростью возможно.
Рассмотрим теперь движение автомобиля по «мертвой петле» с выключенным мотором. Как уже отмечалось, обычно момент силы трения противодействует моменту, приложенному к колесам со стороны мотора. При движении автомобиля с выключенным мотором этого момента нет, и силой трения между колесами автомобиля и дорогой можно пренебречь.
Скорость автомобиля уже не будет постоянной — касательная составляющая силы тяжести замедляет или ускоряет движение автомобиля по «мертвой петле». Центростремительное ускорение тоже будет меняться. Создается оно, как обычно, равнодействующей силы реакции дороги и проекции силы тяжести на направление к центру петли.
Задача 10. Какую наименьшую скорость должен иметь автомобиль в нижней точке петли D (см. рис.  для того, чтобы совершить ее с выключенным мотором? Чему будет равна при этом сила давления автомобиля на дорогу в точке В? Радиус петли R = 100 м, масса автомобиля m = 0,5 т.
для того, чтобы совершить ее с выключенным мотором? Чему будет равна при этом сила давления автомобиля на дорогу в точке В? Радиус петли R = 100 м, масса автомобиля m = 0,5 т.
Посмотрим, какую минимальную скорость может иметь автомобиль в верхней точке петли А, чтобы продолжать двигаться по окружности?
Центростремительное ускорение в этой точке дороги создается суммой силы тяжести и силы реакции дороги  . Чем меньшую скорость имеет автомобиль, тем меньшая возникает сила реакции NA. При значении
. Чем меньшую скорость имеет автомобиль, тем меньшая возникает сила реакции NA. При значении  эта сила обращается в нуль. При меньшей скорости сила тяжести превысит значение, необходимое для создания центростремительного ускорения, и автомобиль оторвется от дороги. При скорости сила реакции дороги обращается в нуль только в верхней точке петли. В самом деле, скорость автомобиля на других участках петли будет большей, и как легко видеть из решения предыдущей задачи, сила реакции дороги тоже будет большей, чем в точке А. Поэтому, если автомобиль в верхней точке петли имеет скорость , то он нигде не оторвется от петли.
эта сила обращается в нуль. При меньшей скорости сила тяжести превысит значение, необходимое для создания центростремительного ускорения, и автомобиль оторвется от дороги. При скорости сила реакции дороги обращается в нуль только в верхней точке петли. В самом деле, скорость автомобиля на других участках петли будет большей, и как легко видеть из решения предыдущей задачи, сила реакции дороги тоже будет большей, чем в точке А. Поэтому, если автомобиль в верхней точке петли имеет скорость , то он нигде не оторвется от петли.
Теперь определим, какую скорость должен иметь автомобиль в нижней точке петли D, чтобы в верхней точке петли А его скорость . Для нахождения скорости υD можно воспользоваться законом сохранения энергии, как если бы автомобиль двигался только под действием силы тяжести. Дело в том, что сила реакции дороги в каждый момент направлена перпендикулярно перемещению автомобиля, а, следовательно, ее работа равна нулю (напомним, что работа ΔA = F·Δs·cos α, где α — угол между силой F и направлением перемещения Δs). Силой трения между колесами автомобиля и дорогой при движении с выключенным мотором можно пренебречь. Поэтому сумма потенциальной и кинетической энергии автомобиля при движении с выключенным мотором не меняется.
Приравняем значения энергии автомобиля в точках А и D. При этом будем отсчитывать высоту от уровня точки D, то есть потенциальную энергию автомобиля в этой точке будем считать равной нулю. Тогда получаем
![]()
Подставляя сюда значение для искомой скорости υD, находим:  ≈ 70 м/с ≈ 260 км/ч.
≈ 70 м/с ≈ 260 км/ч.
Если автомобиль въедет в петлю с такой скоростью, то он сможет совершить ее с выключенным мотором.
Определим теперь, с какой силой при этом автомобиль будет давить на дорогу в точке В. Скорость автомобиля в точке В опять легко находится из закона сохранения энергии:
![]()
Подставляя сюда значение , находим, что скорость  .
.
Воспользовавшись решением предыдущей задачи, по заданной скорости находим силу давления в точке B:
![]() Н.
Н.
Аналогично можно найти силу давления в любой другой точке «мертвой петли».
Упражнения
1. Найти угловую скорость искусственного спутника Земли, вращающегося по круговой орбите с периодом обращения Т = 88 мин. Найти линейную скорость движения этого спутника, если известно, что его орбита расположена на расстоянии R = 200 км от поверхности Земли.
2. Диск радиуса R помещен между двумя параллельными рейками. Рейки движутся со скоростями υ1 и υ2. Определить угловую скорость вращения диска и скорость его центра. Проскальзывание отсутствует.
3. Диск катится по горизонтальной поверхности без проскальзывания. Показать, что концы векторов скоростей точек вертикального диаметра находятся на одной прямой.
4. Самолет движется по окружности с постоянной горизонтальной скоростью υ = 700 км/час. Определить радиус R этой окружности, если корпус самолета наклонен на угол α = 5°.
5. Груз массы m = 100 г, подвешенный на нити длины l = 1 м, равномерно вращается по кругу в горизонтальной плоскости. Найти период обращения груза, если при его вращении нить отклонена по вертикали на угол α = 30°. Определить также натяжение нити.
6. Автомобиль движется со скоростью υ = 80 км/ч по внутренней поверхности вертикального цилиндра радиуса R = 10 м по горизонтальному кругу. При каком минимальном коэффициенте трения между шинами автомобиля и поверхностью цилиндра это возможно?
7. Груз массой m подвешен на нерастяжимой нити, максимально возможное натяжение которой равно 1,5m·g. На какой максимальный угол α можно отклонить нить от вертикали, чтобы при дальнейшем движении груза нить не оборвалась? Чему будет равно при этом натяжение нити в тот момент, когда нить составит угол α/2 с вертикалью?
Ответы
I. Угловая скорость искусственного спутника Земли  ≈ 0,071 рад/с. Линейная скорость спутника υ = ω·R. где R — радиус орбиты. Подставляя сюда R = R3 + h, где R3 ≈ 6400 км, находим υ ≈ 467 км/с.
≈ 0,071 рад/с. Линейная скорость спутника υ = ω·R. где R — радиус орбиты. Подставляя сюда R = R3 + h, где R3 ≈ 6400 км, находим υ ≈ 467 км/с.
2. Здесь возможны два случая (рис. 1). Если угловая скорость диска ω, а скорость его центра υ, то скорости точек, соприкасающихся с рейками, будут соответственно равны
в случае a) υ1 = υ + ω·R, υ2 = υ – ω·R;
в случае б) υ1 = υ + ω·R, υ2 = ω·R – υ.
(Мы приняли для определенности, что υ1 > υ2). Решая эти системы, находим:
а)
б) 
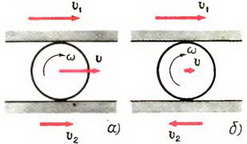
Рис. 1.
3. Скорость любой точки М, лежащей на отрезке ОВ (см. рис. 2), находится по формуле υM = υ + ω·rM, где rM — расстояние от точки М до центра диска О. Для любой точки N, принадлежащей отрезку ОА, имеем: υN = υ – ω·rN, где rN — расстояние от точки N до центра. Обозначим через ρ расстояние от любой точки диаметра ВА до точки А соприкосновения диска с плоскостью. Тогда очевидно, что rM = ρ – R и rN = R – ρ = –(ρ – R). где R — радиус диска. Поэтому скорость любой точки на диаметре ВА находится по формуле: υρ = υ + ω·(ρ – R). Так как диск катится без проскальзывания, то  и для скорости υρ получаем υρ = ω·ρ. Отсюда следует, что концы векторов скоростей находятся на прямой, выходящей из точки А и наклоненной к диаметру ВА под углом, пропорциональным угловой скорости вращения диска ω.
и для скорости υρ получаем υρ = ω·ρ. Отсюда следует, что концы векторов скоростей находятся на прямой, выходящей из точки А и наклоненной к диаметру ВА под углом, пропорциональным угловой скорости вращения диска ω.
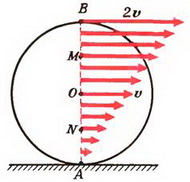
Рис. 2.
Доказанное утверждение позволяет нам сделать вывод, что сложное движение точек, находящихся на диаметре ВА, можно в каждый данный момент рассматривать как простое вращение вокруг неподвижной точки А с угловой скоростью ω, равной угловой скорости вращения вокруг центра диска. В самом деле, в каждый момент скорости этих точек направлены перпендикулярно диаметру ВА, а по величине равны произведению ω на расстояние до точки А.
Оказывается, что это утверждение справедливо для любой точки диска. Более того, оно является общим правилом. При любом движении твердого тела в каждый момент существует ось, вокруг которой тело просто вращается — мгновенная ось вращения.
4. На самолет действуют (см. рис. 3) сила тяжести Р = m·g и подъемная сила N, направленная перпендикулярно плоскости крыльев (так как самолет движется с постоянной скоростью, то сила тяги и сила лобового сопротивления воздуха уравновешивают друг друга). Равнодействующая сил Р и N должна быть направлена к центру окружности, по которой движется самолет, и создавать центростремительное ускорение  . Из рисунка находим:
. Из рисунка находим:
 или
или  км.
км.
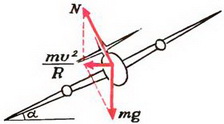
Рис. 3.
5. Равнодействующая силы тяжести Р = m·g и силы натяжения нити Т должна создавать центростремительное ускорение ац = ω2·R, где R = l·sin α — радиус круга, по которому вращается груз. Из рисунка 4 получаем:
m·ω2·R = m·g·tg α, откуда 
Период обращения груза 
Натяжение нити 
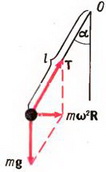
Рис. 4.
6. На автомобиль действуют (рис. 5) сила тяжести Р = m·g, сила реакции со стороны цилиндра N и сила трения Fтp. Так как автомобиль движется по горизонтальному кругу, то силы Р и Fтp уравновешивают друг друга, а сила N создает центростремительное ускорение  . Максимальное значение силы трения связано с силой реакции N соотношением: Fтp = k·N. В результате получаем систему уравнений:
. Максимальное значение силы трения связано с силой реакции N соотношением: Fтp = k·N. В результате получаем систему уравнений:  , из которой находится минимальное значение коэффициента трения
, из которой находится минимальное значение коэффициента трения 
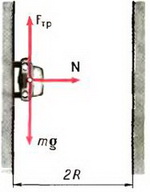
Рис. 5.
7. Груз будет двигаться по окружности радиуса l (рис. 6). Центростремительное ускорение груза  (υ — скорость груза) создается разностью величин силы натяжения нити Т и проекции силы тяжести m·g направление нити:
(υ — скорость груза) создается разностью величин силы натяжения нити Т и проекции силы тяжести m·g направление нити:  . Поэтому
. Поэтому  , где β — угол, образуемый нитью с вертикалью. По мере того, как груз будет опускаться, его скорость будет расти, а угол β будет уменьшаться. Натяжение нити станет максимальным при угле β = 0 (в тот момент, когда нить будет вертикальной):
, где β — угол, образуемый нитью с вертикалью. По мере того, как груз будет опускаться, его скорость будет расти, а угол β будет уменьшаться. Натяжение нити станет максимальным при угле β = 0 (в тот момент, когда нить будет вертикальной):  . Максимальная скорость груза υ0 находится по углу α, на который отклоняют нить, из закона сохранения энергии:
. Максимальная скорость груза υ0 находится по углу α, на который отклоняют нить, из закона сохранения энергии:
![]()
Используя это соотношение, для максимального значения натяжения нити получаем формулу: Tmax = m·g·(3 – 2 cos α). По условию задачи Tmах = 2m·g. Приравнивая эти выражения, находим cos α = 0,5 и, следовательно, α = 60°.
Определим теперь натяжение нити при  . Скорость груза в этот момент также находится из закона сохранения энергии:
. Скорость груза в этот момент также находится из закона сохранения энергии:
Подставляя значение υ1 в формулу для силы натяжения, находим:
![]()
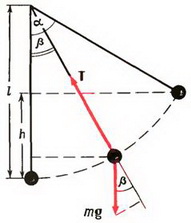
Рис. 6.
Вследствие
различия деформаций колеса и рельса в
зоне контакта путь, пройденный
геометрическим центром колеса, меньше
пути, подсчитанного по угловой скорости
вращения колеса в предположении качения
без скольжения. Это явление с кинематической
точки зрения рассматривают как
проскальзывание,
но учитывая причину его возникновения,
такое проскальзывание называют упругим,
псевдоскольжением или крипом. При
качении колесной пары со скольжением
обобщенные координаты

и
не обязательно изменяются по гармоническому
закону, скорости в точках

и

контакта колес с рельсами не равны нулю
и скорости проскальзывания на основе
ранее полученных соотношений определяются:

.
Результаты
теоретических исследований показывают,
что силы взаимодействия деформируемых
колес и рельсов могут быть выражены
через относительные скорости
проскальзывания, которые находят как
частное от деления скоростей проскальзывания
на скорость движения. Относительные
скорости проскальзывания определяются
выражениями:
.
Эти
соотношения в дальнейшем будут
использованы для определения сил реакций
рельсов на колесную пару.
Содержание книги
Предыдующая страница
§3. Криволинейное движение. Плоскопараллельное движение твердого тела
3.6 Плоскопараллельное движение
Движение твердого тела называется плоскопараллельным, если траектории движения всех его точек являются плоскими кривыми, лежащими в параллельных плоскостях.
Плоскопараллельное движение твердого тела можно представить как суперпозицию поступательного движения и вращения вокруг оси, направление которой не изменяется. Наглядными примерами такого движения являются качение колеса, движение книги без отрыва от стола и т.д.
Для описания положения абсолютно твердого тела при плоскопараллельном движении необходимо задать две декартовые координаты какой-либо точки тела [1] и угол его поворота, то есть плоскопараллельное движение обладает тремя степенями свободы.
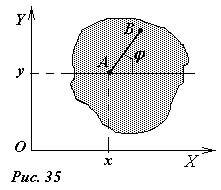
Выберем внутри тела две точки A, B; зададим координаты xA, yA точки A и угол φ, который образует отрезок AB с направлением оси X. Три числа xA, yA и φ однозначно определяют положение тела на плоскости, следовательно, являются его координатами. Зная эти координаты, можно определить положение в пространстве любой другой точки твердого тела путем геометрических построений.
Покажем теперь, как можно найти скорость любой точки твердого тела при плоскопараллельном движении (рис. 36).
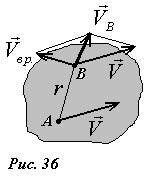
Разложим движение на две составляющих — поступательное движение, скорость которого обозначим (~vec V) , и вращение вокруг оси, проходящей через точку A, с угловой скоростью (~omega = frac{Delta varphi}{Delta t}) . Тогда скорость любой другой точки тела (например, B) является векторной суммой скоростей поступательного и вращательного движений —
(~vec V_B = vec V + vec V_{BP}) , (1)
причем вектор скорости вращательного движения направлен перпендикулярно отрезку AB и равен по абсолютной величине VBP = ωr, где r расстояние от точки B до оси вращения.
Рассмотрим катящееся без проскальзывания колесо радиуса R (рис. 37).

Пусть его центр движется со скоростью (~vec V). Найдем скорости некоторых других точек колеса. Для этого представим движение колеса как сумму поступательного движения его центра и вращения вокруг его оси. Так как движение происходит без проскальзывания, то угловая скорость вращения определяется формулой (~omega = frac{upsilon}{R}). Для точек, находящихся на ободе колеса линейная скорость вращательного движения равна по модулю скорости поступательного движения, так как для них расстояние до оси вращения равно радиусу колеса, поэтому (~V_{BP} = omega r = frac{V}{R} R = V) . Однако, направление этой скорости различно для разных точек. Так, для точки A скорость вращательного движения направлена горизонтально, также как и скорость поступательного движения. Поэтому суммарная скорость точки A равна 2V и направлена горизонтально. Скорость вращательного движения точки B направлена вертикально вверх, поэтому ее полная скорость направлена под углом 45° к горизонту, а ее модуль (~V_B = V sqrt{2}) . Очень интересна точка касания с поверхностью C : скорость ее вращательного движения направлена горизонтально в сторону противоположную скорости поступательного движения, поэтому ее полная скорость равна нулю.
Так как разложение движения на составляющие не является однозначным, можно теперь представить качение колеса как сумму движения точки C и вращения вокруг оси, проходящей через эту точку. Мы показали, что скорость точки C равна нулю, поэтому появляется возможность рассматривать движение колеса как чистый поворот вокруг точки C. Правда, это возможно в течение только бесконечно малого промежутка времени, потому, что в следующий момент точкой касания будет другая точка колеса. Множество точек твердого тела, скорости которых в данный момент равны нулю, образуют мгновенную ось вращения тела. Такая ось существует при любом движении твердого тела. Правда положение этой оси постоянно изменяется, поэтому для вычисления координат точек такое представление движения не дает особых преимуществ. Но для вычисления скоростей точек, рассматривать плоскопараллельное движение как чистый поворот очень удобно.
Легко доказать, что угол поворота тела не зависит от того, относительно какой оси мы его рассматриваем, следовательно, и угловая скорость не зависит от оси. С этой точки зрения, скорость любой точки колеса определяется формулой V = ωr’ , где r’ — расстояние от данной точки до мгновенной оси вращения.
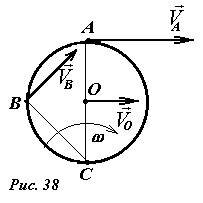
Рассмотренная задача об определении скоростей точек катящегося колеса может быть легко решена, если рассматривать его движение как поворот вокруг точки C (рис. 38): точка A находится на расстоянии 2R от мгновенной оси вращения, поэтому ее скорость равна VA = 2Rω = 2V; точка B находится на расстоянии (~R sqrt{2}) от оси, ее скорость (~V sqrt{2}). Направления векторов скоростей также совпадают с полученными ранее.
Таким образом, мы имеем два примерно одинаковых по сложности способа описания движения твердого тела: первый — суперпозиция поступательного и вращательного движений: второй — поворот вокруг мгновенной оси.
Примечания
- ↑ С точки зрения кинематического описания выбор этой точки произволен — только следует стремиться к тому, чтобы траектория этой точки была попроще. Далее мы укажем как можно легко найти такую точку.
Следующая страница
В лобовой передаче окружные скорости точек на этой площадке (кроме одной точки), принадлежащие ведущему и ведомому звеньям, неодинаковы (рис. 3.30), из-за чего происходит проскальзывание. Скорость скольжения Уск в любой точке N площадки контакта определяется как разность скорости Уц, катка 2, направленной перпендикулярно его образующей, и скорости диска 1 — перпендикулярно радиусу ОМ. В точках контакта, расположенных на теоретической линии контакта АВ, вектор скорости скольжения пер- [c.252]
Угловая скорость зависит от разности скоростей центра и точки касания (рис. 157, с. 295). Так как цилиндр катится по бруску без проскальзывания, скорость точки касания равна скорости бруска г 2 [c.301]
Поместим описанный выше гироскопический шар Бобылева — Жуковского на горизонтальную плоскость, по которой он может кататься без проскальзывания, и свяжем с ним движущуюся поступательно ортогональную систему координат Ахуг с началом в точке опоры шара о плоскость и осью Л г, направленной вертикально вверх. Вектор угловой скорости шара й направим вдоль оси мгновенного вращения, которая проходит через точку Л, так как в силу отсутствия проскальзывания скорость этой точки шара равна нулю. Пусть и Оэ — проекции угловой скорости И на ось динамической симметрии шара и на его экваториальную плоскость (О — угловая скорость вращения гироскопа вокруг собственной оси, т. е. проекция угловой скорости гироскопа на его ось. Обозначим через Лш, Сш и Лг, Сг соответственно экваториальные и полярные моменты инерции шара и гироскопа относительно их общего центра. [c.68]
Полагая, что качение кулачков происходит с проскальзыванием, скорость V i2 будет равна разности скорости кулачков в зоне контакта, т. е. [c.144]
Принцип бесцентрового шлифования состоит в том, что деталь помещают между двумя абразивными кругами. Один из кругов, имеющий большой диаметр, вращается с окружной скоростью 30—35 м/с—этот круг является шлифующим (рабочим). Второй круг, имеющий меньший диаметр, вращается в ту же сторону, что и шлифующий, и имеет окружную скорость 0,2—0,4 м/с, т. е. примерно в 60—100 раз меньше, чем шлифующий круг — этот круг является ведущим. Ведущий круг предназначен для вращения детали в противоположном ему направлении и осуществляет тем самым попутное шлифование (рис. 62), при этом без учета проскальзывания скорости вращения детали и ведущего круга равны и направлены в одну сторону. [c.143]
Далее рассмотрены характеристики шин, определяющие поведение автомобиля радиальная жесткость, сопротивление качению (при движении по прямой и на повороте), сцепление шины в продольном направлении и его зависимость от различных факторов (проскальзывание, скорость движения, тип и состояние дорожного покрытия, рисунок протектора и его глубина, толщина водяной пленки, температура льда, наличие шипов), явление аквапланирования, сцепление шины в боковом направлении, характеристики увода, коэффициент загрузки шины на автомобиле, стабилизирующий момент, снос боковой силы. Описана реакция автомобиля, обусловленная шинами, на изменение подачи топлива, а также явление дисбаланса шин и колес. [c.85]
Для фрикционной передачи имеют значение только скорости в точках А и А. Они равны. Скорость гибкого колеса одновременно является и окружной скоростью жесткого колеса (без учета проскальзывания). [c.192]
Здесь не рассматриваются материалы, для которых основным механизмом пластической деформации при скоростях деформации Ю- —10- с- является проскальзывание по границам зерен. [c.155]
Скорость деформации проскальзывания g(, может быть определена из выражения [256] [c.158]
Груз А массы М], опускаясь вниз, при помощи троса, перекинутого через неподвижный блок Д поднимает вверх груз В массы М2, прикрепленный к оси подвижного блока С. Блоки С н О считать однородными сплошными дисками массы Мз каждый. Определить скорость груза А в момент, когда он опустится на высоту /г. Массой троса, проскальзыванием по ободам блоков и силами сопротивления пренебречь. В начальный момент система на-> ходилась в покое. [c.299]
Повышение скорости относительного движения (качение с проскальзыванием) оказывает до известной степени благоприятное влияние. Поврежденный слой в процессе износа постепенно удаляется, вследствие чего выкрашивания не возникает. Долговечность сочленения здесь зависит от интенсивности абразивного износа, изменяющего с течением времени первоначальную форму контактных поверхностей. [c.345]
Достоинствами фрикционных передач являются простота конструкции катков, плавность и бесшумность работы, возможность осуществления бесступенчатого регулирования угловых скоростей. К недостаткам относятся большие давления на валы и опоры, что ограничивает использование фрикционных передач при значительных мощностях непостоянство мгновенных передаточных отношений, обусловленное проскальзыванием и погрешностями формы рабочих поверхностей необходимость регулировки силы прижатия катков сравнительно высокий износ, а также опасность местного износа рабочих поверхностей при пробуксовке катков. [c.250]
У фрикционных передач, как у передач трением, окружные скорости рабочих поверхностей вследствие проскальзывания сопряженных катков не равны. Связь между окружными скоростями [c.250]
Разрушение сепараторов вы-зывается центробежными силами и воздействием на сепаратор тел качения. Воздействия на сепаратор тел качения особенно существенны в подшипниках, работающих с осевой нагрузкой или с предварительным натягом, когда нагружены все тела качения в подшипнике. Тогда тела качения, имея неодинаковый в пределах допуска диаметр, вращаются вокруг оси вала с неодинаковой скоростью, оказывают на сепаратор силовые воздействия, изнашивают его и сами испытывают автоколебания, связанные с неизбежным проскальзыванием. Разница в скоростях тел качения возникает также в результате перекосов осей колец. [c.351]
Если коэффициент трения будет меньше этой величины, то сила F яе может принять значения, определяемого равенством (г), и цилиндр будет катиться с проскальзыванием. В этом случае u и ш не связаны зависимостью v =
мгновенным центром скоростей), но зато величина F имеет предельное значение, т. е. F—fN-=fP os ot, и уравнения (а) принимают вид. [c.330]
В конце соударения тележка 1 останавливается, а контейнер приобретает угловую скорость вращения вокруг ребра А, закрепленного упорной планкой. Считать контейнер массой то = 500 кг однородным прямоугольным параллелепипедом (а = 0,9 м, h = 1,2 м), а вертикальные плоскости соударения тележек — гладкими. Поверхность рельсов абсолютно шероховата, т. е. препятствует проскальзыванию колес при соударении тележек. Моменты инерции колес относительно их осей пренебрежимо малы. [c.224]
Считать, что за время подъема цилиндра на наклонную плоскость скорость тележки 2, полученная ею в конце удара, остается постоянной, а вертикальные плоскости соударения тележек — гладкие. Поверхность рельсов абсолютно шероховата, т. е. препятствует проскальзыванию колес при соударении тележек. Моменты инерции колес относительно их осей пренебрежимо малы. [c.229]
Дальнейшим развитием теории строения границ зерен является установление факта суш,ествования на границах зерен, включая н большеугловые, зернограничных дислокаций (рис. 96, в). В этом случае граница зерна состоит из участков мест совпадения и зернограничных дислокаций (ЗГД). Зернограничные дислокации могут быть подвижными и сидячими. Подвижные ЗГД могут перемещаться вдоль границы и играют важную роль в зернограничном проскальзывании. Скорость такого проскальзывания увеличивается с ростом плотности ЗГД. Наличие ЗГД подтверждается электронномикроскопическими исследованиями границ специально выращенных бикристаллов. [c.166]
Разматывающее устройство УР1-50 (рис. 56, а) предназначено для плавного разматывания рулонов металлической ленты и создания компенсационной петли (с небольшим колебанием ее величины). При включении электродвигателя 5 вращение через редуктор 6, ременную передачу 7 и дисковую фрикционную муфту 8 передается на диск 1 рулонодержателя. Лента сматывается и механизмом подачи 2 пресса-автомата подается в штамп. Так как скорость сматывания всегда больше скорости подачи ленты в пресс, то штанга 3, следующая за петлей ленты, опускается, поворачивая рычаг 12 и ротор 14. Открывается отверстие в корпусе 15 распределительного устройства 13, и воздух поступает в пневмоцилиндр 11. Каналы для воздуха в распределительном устройстве выполнены таким образом, что в зависимости от угла поворота ротора происходит переключение подачи воздуха в полости пневмоцилиндра. Пневмоцилиндр клином 10 воздействует через рычаги 9 на колодки 4, которые давят на тормозные накладки, и тормозит диск рулонодержателя. Фрикционная дисковая муфта работает с проскальзыванием. Скорость вращения диска рулонодержателя падает, и петля ленты начинает уменьшаться, в ре- [c.108]
Без учета проскальзывания скорость ползуна Уз равна гг — составляющей скорости т. К ролика вдоль оси вала, причем 2 = VI + 2ь где VI — окружная скорость т. вала Ггх — окружная скорость т. К ролика. Из плана скоростей видно, что чем больще наклон оси ролика, тем больше V2. [c.387]
Шлифовальный круг, изготовляемый на керамической связке, вращается со скоростью 25—35 м1сек ведущий круг изготовляют на вулканитовой связке, что повышает сцепляемость круга с заготовкой и обеспечивает их обкатку почти без проскальзывания. Скорость ведущего круга к 20-I-50 м1мин. Шлифовальный круг, имея значительно большую скорость, чем ведущий круг и заготовка, проскальзывает относительно заготовки и шлифует ее. [c.171]
В соответствии с указанными условиями однозначности скорости фаз на входе в канал равны (коэффициент скольжения фаз фг, = = 1), слой не продувается и находится под действием сил предельного равновесия в плотном состоянии. Последнее означает, что твердый компонент достиг такой объемной концентрации, при которой все соседние частицы обязательно кон-тактируются друг с другом. Движение плотного слоя возникает за счет периодического нарушения предельного равновесия, приводящего к конечным деформациям сдвига без разрыва контактов. Однако согласно граничным условиям на стенке канала скорость частиц не падает до нуля. Так как для газовой среды (и)ст = 0, то Фг с,т= ( т/ )ст—>-оо. Наконец, условие ф1,= 1 на входе в канал не означает, как это обычно полагают, автоматического равенства скоростей фаз непродуваемого слоя по длине канала. Предварительные опыты показали, что при определенных условиях и в ядре движущегося слоя возможно небольшое проскальзывание фаз потока. Если пренебречь отмеченными смещениями скорости компонентов слоя, т. е. если положить фч,= 1, то v vi = v n-Если дополнительно принять, что концентрация (пороз-ность) движущегося плотного слоя неизменна (p = onst), то тогда взамен уравнения сплошности (1-30) приближенно получим [c.288]
Область А — А/ т>22—30. В ядре потока — без-градиентное по скорости движение без смещения и поперечных передвижений частиц. В пристенном слое — падение скорости и изменение характера движения из-за разрыхленности. Последнее вызвано вращением, перемещением и проскальзыванием частиц в пределах пристенной зоны. Этот пристенный эффект объясним возникновением пар сил трения на стенке канала и на границе с ядром потока, создающим соответствующие моменты вращения (по часовой стрелке). Влияние диаметра канала по данным [Л. 30] представлено на рис. 9-3. Доля влияния пристенного слоя на общий характер движения и на структуру слоя мала. Поэтому область А можно назвать областью автомодельности относительно A/Wt (областью широких каналов). [c.293]
Пдь = (Пс — п )1пс, причем rigb > О [256]. Допустив, что скорость деформации проскальзывания связана со скоростью про-кальзывания соотношением gb = u/dg dg — диаметр зерна) и подставив (3.3) и (3.5) в (3.2), получим уравнение для параметра ам — dJ/dE [c.158]
При относительно небольших соотношение между ам и авкл может быть различным. При не очень низких р, когда проскальзывание не аккомодируется диффузией, ам > авкл. При низких р, когда диффузионные процессы приводят к релаксации напряжений у включений, особенно расположенных по границам зерен (Db 10 Dt) [256]), осм может быть меньше вкл-Последнее условие не означает пе рехода на внутризеренное разрушение, так как при малых падение ам будет компенсироваться увеличением скорости роста межзеренных пор. [c.160]
В данной главе рассмотрено разрушение материала, при котором критические параметры Nf или ef) существенно зависят от времени нагружения или от скорости деформирования. При испытании в инертных средах чувствительность материала к скорости деформирования в основном связана с межзеренным характером накопления повреждений и разрушения при вну-тризеренном разрушении такой чувствительности не наблюдается. Скоростная зависимость Nf H) или ef( ) в первую очередь обусловлена накоплением повреждений по границам зерен не только за счет пластического деформирования, но и за счет диффузии вакансий в теле зерна активность диффузионных процессов значительно ниже, чем по границам, и они практически не оказывают влияния на внутризеренное повреждение. Переход от межзеренного разрушения к внутризеренному при увеличении I связан с нивелированием диффузионных процессов по границам зерен и отсутствием проскальзывания зерен. [c.186]
Большие нагрузки на валы и опоры и неизбежность проскальзывания между телами качения ограничивают применение фрикционных передач, несмотря на их существенные достоинства — простоту, бесшумность и возможность использования для бесступенчатого регулированил скорости. Фрикционные передачи с постоянным передаточным числом применяют преимущественно в кинематических цепях приборов. [c.82]
Колесо радиуса г катится по прямолинейному горизонтальному рельсу под действием приложенного вращающего момента mвp = 2fMgr, где / — коэффициент трения скольжения, М— масса колеса. Определить скорость точки колеса, соприкасающейся с рельсом (скорость проскальзывания). Масса колеса равномерно распределена по его ободу. Трением качения пренебречь, В начальный момент колесо находилось в покое. [c.308]
Еслп при этом одна из фаз — жидкость или газ, и в смеси отсутствуют фазовые переходы, то обычно можно принять, что на меялфазной поверхности равны не только нормальные, но и касательные составляющие скоростей фаз, что соответствует условию прилипания или отсутствию проскальзывания. Тогда из [c.63]
Принимая отсутствие вращения частиц и проскальзывания фаз из-за вязкости, на межфазноп поверхности скорость несущей жидкости можно представить в виде vi = v — — где — [c.188]
Сравнительно большое несоответствие между теорией и экспериментальными данными для скорости частиц было отнесено за счет неодномерности потока частиц и их проскальзывания у стенок сопла [726, 7451. Хотя сопло было спроектировано в предположении равномерного распределения твердых частиц в любом поперечном сечении, они приобретают электростатический заряд и скапливаются у стенок сопла [731]. Заметим также, что при большей скорости изменения сечения расхождение между теорией и экспериментом увеличивается. При большой скорости изменения площади исследуемого сопла основное допущение об одномерности течения становится непригодным. В соответствии с теорией пограничного слоя можно ввести поправку, учитывающую распределение концентрации в поперечном сечении (разд. 8.5). [c.321]
При автоматической сварке дефекты возникают вследствие колебания напряжения в сети, проскальзывания проволоки в подающих роликах, неравномерной скорости сварки из-за люфтов в механизме передвижения сварочной головки, неправильного угла наклона электрода, протекания жидкого металла в зазор. При ручной и полуавтоматической сварках дефекты могут быть вызваны недостаточной квалификацией сварщика, нарушением технологических режимов, плохим качеством электродов и других сварочных материалов. Нарушение формы и размеров шва нередко свидетельствуют о наличии таких дефектов, как наплывы (натеки), подфезы, прожоги и незаверенные кратеры. [c.135]
В конце соударения вагонетка / и тележка 2 приобретают одинаковую скорость движения по горизонтальному прямолинейному пути, а цилиндр — угловую скорость вращения вокруг ребра Е ступеньки DE. Поверхность ступеньки абсолютно щероховата, т. е. препятствует проскальзыванию цилиндра при ударном воздействии отрыва цилиндра при ударе [c.225]
Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях – решение задачи
Основные законы и формулы, применяемые при решении задач
Вращательное движение вокруг неподвижной оси
Рассмотри твердое тело, вращающееся вокруг неподвижной оси z . Сделаем рисунок. Ось вращения направим перпендикулярно плоскости рисунка, на нас. Пусть φ – угол поворота тела вокруг оси, отсчитываемый от некоторого начального положения. За положительное направление выберем направление против часовой стрелки. Угловая скорость ω равна производной угла поворота по времени t :
.
При , тело вращается против часовой стрелки; при – по часовой. Вектор угловой скорости направлен перпендикулярно плоскости рисунка. При он направлен на нас; при – от нас.
Угловое ускорение ε равно производной угловой скорости по времени:
.
Вектор углового ускорения также направлен перпендикулярно плоскости рисунка. При он направлен на нас; при – от нас.
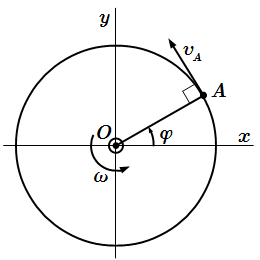
Скорость точки при вращательном движении тела вокруг неподвижной оси
Рассмотрим точку A , принадлежащую твердому телу. Опустим из нее перпендикуляр OA на ось вращения. Пусть – расстояние от точки до оси. Траекторией движения точки A является окружность (или дуга) с центром в точке O радиуса .
Абсолютное значение скорости точки A определяется по формуле:
.
Вектор скорости направлен по касательной к траектории (окружности), перпендикулярно отрезку OA . При этом вектор должен производить закручивание в ту же сторону, что и вектор угловой скорости .
Касательное (или тангенциальное) ускорение точки A определяется аналогично скорости:
.
Оно направлено по касательной к окружности, перпендикулярно OA . При этом вектор должен производить закручивание в ту же сторону, что и вектор углового ускорения .
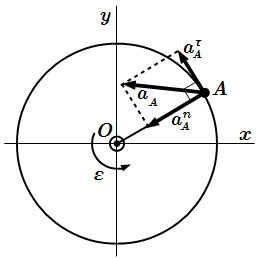
Ускорение точки при вращательном движении тела вокруг неподвижной оси
Нормальное ускорение всегда направлено к центру окружности и имеет абсолютную величину
.
Полное ускорение точки A , или просто ускорение, равно векторной сумме касательного и нормального ускорений:
.
Поскольку векторы и перпендикулярны, то абсолютная величина ускорения точки A определяется по формуле:
.
Поступательное прямолинейное движение
Теперь рассмотрим прямолинейное поступательное движение тела. Направим ось x вдоль его линии движения. Пусть s есть перемещение тела вдоль этой оси относительно некоторого начального положения. Тогда скорость движения всех точек тела равна производной перемещения по времени:
.
При , вектор скорости направлен вдоль оси x . При – противоположно этой оси.
Ускорение точек тела равно производной скорости по времени, или второй производной перемещения по времени:
.
При , вектор ускорения направлен вдоль оси x . При – противоположно.
Соприкосновение тел без проскальзывания
Рассмотрим два тела, находящиеся в зацеплении без проскальзывания. Пусть точка A принадлежит первому телу, а точка B – второму. И пусть, в рассматриваемый момент времени, положения этих точек совпадают. Тогда, если между телами нет проскальзывания, то скорости этих точек равны:
.
Если каждое из тел вращается вокруг неподвижной оси, то равны соответствующие касательные ускорения:
.
Если одно из тел движется поступательно (пусть это второе тело), то ускорение его точек равно касательному ускорению точки соприкосновения первого тела:
.
Пример решения задачи
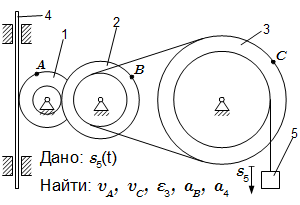
Механизм состоит из ступенчатых колес 1, 2, 3, находящихся в зацеплении и связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес. Радиусы ступеней колес равны соответственно: у колеса 1 – r1 = 2 см, R1 = 4 см, у колеса 2 – r2 = 6 см, R2 = 8 см, у колеса 3 – r3 = 12 см, R3 = 16 см. На ободьях колес расположены точки A, B и C. Задан закон движения груза: s5 = t 3 – 6t (см). Положительное направление для s5 – вниз.
Определить в момент времени t = 2 скорости точек A, C; угловое ускорение колеса 3; ускорение точки B и ускорение рейки 4.
Указания. Эта задача – на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что проскальзывание в ременной передаче и в точках сцепления колес отсутствует. То есть скорости точек колес, находящихся в зацеплении равны, а скорости точек ремня равны скорости точек, лежащих на ободе колес, связанных ременной передачей.
Дано:
t = 2 с; r1 = 2 см, R1 = 4 см; r2 = 6 см, R2 = 8 см; r3 = 12 см, R3 = 16 см; s5 = t 3 – 6t (см).
Определение скорости и ускорения груза 5
Груз 5 совершает поступательное движение. Поэтому скорости (и ускорения) всех его точек равны. В условии задачи задано смещение s груза относительно некоторого начального положения. Дифференцируя по времени t , находим зависимость скорости точек груза от времени:
.
Дифференцируя скорость груза по времени, находим зависимость ускорения груза от времени:
.
Находим скорость и ускорение груза в заданный момент времени :
см/с;
см/с 2 .
Определение угловых скоростей и ускорений колес
Груз 5 связан нитью с внутренним ободом колеса 3. Поэтому скорости точек внутреннего обода колеса 3 равны скорости груза:
.
Отсюда находим угловую скорость колеса 3 для произвольного момента времени:
.
Здесь подразумевается, что и являются функциями от времени t . Дифференцируя по t , находим угловое ускорение колеса 3:
.
Находим значения угловой скорости и углового ускорения в момент времени с. Для этого подставляем найденные значения и при с:
с –1 ;
с –2 .
Рассмотрим колесо 2. Его внутренний обод связан нитью с внешним ободом колеса 3. Поэтому скорости точек на этих ободьях равны:
. Отсюда
.
Дифференцируя по времени, находим угловое ускорение колеса 2 в произвольный момент времени:
.
Подставляем значения для с:
с –1 ;
с –2 .
Рассмотрим колесо 1. Его внутренний обод находится в зацеплении с внешним ободом колеса 2. Поэтому скорости точек на этих ободьях равны:
. Отсюда
.
Дифференцируя по времени, находим угловое ускорение колеса 1 в произвольный момент времени:
.
Подставляем значения для с:
с –1 ;
с –2 .
Итак, мы нашли:
ω 1 = 5.3333 с –1 , ω 2 = 1.3333 с –1 , ω 3 = 0.5 с –1 , ε 1 = 10.6667 с –2 , ε 2 = 2.6667 с –2 , ε 3 = 1 с –2 .
Определение скоростей точек A и C
Точка A лежит на окружности радиуса R1 с центром в точке O1, расположенной на оси вращения. Поэтому скорость этой точки направлена по касательной к окружности и по абсолютной величине равна
см/с.
Точка C лежит на окружности радиуса R3 с центром O3 на оси вращения. Скорость этой точки:
см/с.
Определение ускорения точки B
Точка B лежит на окружности радиуса R2 с центром O2, расположенном на оси вращения. Касательное (или тангенциальное) ускорение этой точки направлено по касательной к окружности в сторону, на которую указывает угловое ускорение (по часовой стрелке). По абсолютной величине оно равно
см/с 2 .
Нормальное ускорение всегда направлено к центру окружности. По абсолютной величине оно равно
см/с 2 .
Полное ускорение равно векторной сумме касательного и нормального ускорений:
.
Поскольку касательное ускорение перпендикулярно нормальному, то для абсолютной величины полного ускорения имеем:
см/с 2 .
Определение ускорения рейки 4
Рейка 4 движется поступательно по направляющим. Она находится в зацеплении с внешним ободом колеса 1. Поэтому ее скорость равна скорости точек внешнего обода колеса 1:
.
Дифференцирую по времени, получаем ускорение рейки в произвольный момент времени:
.
Подставляем численные значения для момента времени t = 2 с :
см/с 2 .
см/с; см/с; с –2 ; см/с 2 ; см/с 2 .
Автор: Олег Одинцов . Опубликовано: 25-10-2019
iSopromat.ru

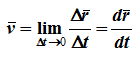
Скоростью точки называют кинематическую меру ее движения, равную производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета.
Скорость относительно выбранной системы отсчета это одна из основных характеристик движения точки.
Вектор скорости направлен по касательной к траектории точки в сторону движения.
Рассмотрим перемещение точки за малый промежуток времени Δ t:

средняя скорость точки за промежуток времени D t.
Наш видеоурок по теме: 
Скорость точки в данный момент времени
Скорость точки при векторном способе задания движения
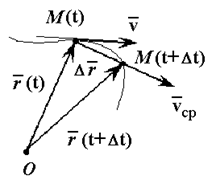
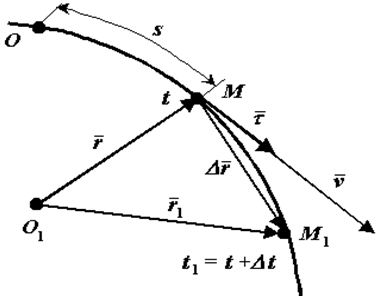
Положение движущейся точки М относительно системы отсчета в момент времени t1 определяется радиус-вектором r.
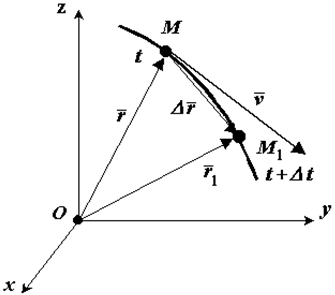
В другой момент времени t1=t+Δt точка займет положение М1 с радиус-вектором r1.
За время Δt радиус-вектор движущейся точки изменится на
Средней скоростью vср называется отношение изменения радиус-вектора Δr к изменению времени Δt.

Скорость точки равна первой производной по времени от ее радиус-вектора.

Скорость точки при координатном способе задания движения
Разложим радиус-вектор и скорость на составляющие, параллельные осям координат. Получим

Проекция скорости точки на какую-либо координатную ось равна первой производной по времени от соответствующей координаты этой точки.
Модуль скорости и направляющие косинусы равны:
Если точка движется в плоскости, то, выбрав оси координат Ox и Oy в этой плоскости, получим:
Для прямолинейного движения точки координатную ось, например ось Ox, направляем по траектории. Тогда
Скорость точки при естественном способе задания движения
Пусть скорость точки задана естественным способом, т.е. заданы траектория точки и закон ее движения по траектории s=f(t).
Вычислим скорость точки. Используем радиус-вектор r. движущейся точки, начало которого находится в неподвижной точке O1

— единичный вектор, направленный по касательной к траектории в сторону возрастающих расстояний.

При ds>0 направления векторов τ и dr совпадают.
Если точка движется в сторону убывающих расстояний, то ds
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
I. Механика
Тестирование онлайн
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Угловая скорость
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период и частота
Период вращения T — это время, за которое тело совершает один оборот.
Частота вращение — это количество оборотов за одну секунду.
Частота и период взаимосвязаны соотношением
Связь с угловой скоростью
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено — это есть период T. Путь, который преодолевает точка — это есть длина окружности.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Вращение Земли
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Как вывести формулу центростремительного ускорения
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение — изменение скорости за единицу времени. Найдем разницу векторов.
Разница векторов есть . Так как , получим
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
http://fizmat.by/kursy/kinematika/okruzhnost