Содержание:
- Общее уравнение динамики
- Порядок решения задач на применение общего уравнения динамики
- Примеры решения задач на тему: Общее уравнение динамики
Общее уравнение механики представляет собой математическую формулировку принципа Д’Аламбера — Лагранжа, дающего общий метод решения задач динамики и статики и являющегося одним из основных принципов теоретической механики.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Общее уравнение динамики
Законы Ньютона установлены для свободной материальной точки и свободной материальной системы. Однако, чаще встречаются несвободные системы. Это обстоятельство существенно усложняет использование законов Ньютона для решения задач динамики несвободных механических систем, а зачастую и вовсе не позволяет решать такие задачи.
Необходимость решения задач динамики несвободных механических систем в связи с их важным практическим значением обусловила разработку ряда методов решения таких задач.
В этом первостепенное значение принадлежит общим принципам и общим уравнениям механики.
Из принципов ранее были рассмотрены следующие.
Принцип Даламбера. Он заключается в том, что
в каждый момент времени уравновешиваются между собой действующие на  — ту точку несвободной материальной системы активные силы
— ту точку несвободной материальной системы активные силы  , реакции связей
, реакции связей  и силы инерции
и силы инерции  , которые приложены к этим точкам. Этот принцип записывается формулой 12.6:
, которые приложены к этим точкам. Этот принцип записывается формулой 12.6:

Принцип возможных перемещений. Он в наиболее общей форме устанавливает условия равновесия несвободных материальных систем и состоит в том, что
для равновесия материальной системы, подчиняющейся идеальным стационарным связям, необходимо и достаточно, чтобы сумма элементарных работ, осуществляемых активными силами  на возможных перемещениях
на возможных перемещениях  точек механической системы, равнялась нулю:
точек механической системы, равнялась нулю:

Принцип возможных перемещений дает общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики для решения задач динамики. Итак, применяя эти два принципа одновременно, можно получить общий метод решения задач динамики, который имеет название общего уравнения динамики:
при движении системы с идеальными связями в каждый данный момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю

где  — сумма элементарных работ активных сил на возможных перемещениях точек приложения этих сил;
— сумма элементарных работ активных сил на возможных перемещениях точек приложения этих сил;
 — сумма элементарных работ сил инерции точек системы на их возможных перемещениях.
— сумма элементарных работ сил инерции точек системы на их возможных перемещениях.
Уравнение (14.3) в развернутой форме можно записать в виде:

Порядок решения задач на применение общего уравнения динамики
Установить, движение какой несвободной системы рассматривается.
Определить характер связей, которые наложенные на систему, учитывая свойство идеальных связей.
Обозначить активные силы, которые действуют на точки системы.
Определить возможные перемещения системы.
Условно приложить к точкам системы силы инерции и подсчитать их величину.
Составить сумму работ активных сил и сил инерции на установленных перемещениях системы.
Из полученного соотношения найти искомые величины.
Применить общее уравнение динамики к решению задач необходимо в том случае, когда по условию задачи с известными активными силами необходимо определить ускорение системы (линейное или угловое), а также силы, действующие на точки системы.
Примеры решения задач на тему: Общее уравнение динамики
Задача №1
Груз  весом
весом  , опускаясь по гладкой наклонной плоскости, которая составляет с горизонтом угол
, опускаясь по гладкой наклонной плоскости, которая составляет с горизонтом угол  , приводит к вращению барабана
, приводит к вращению барабана  весом
весом  с радиусом
с радиусом  с помощью невесомой нити, что не растягивается, рис.14.1).
с помощью невесомой нити, что не растягивается, рис.14.1).
Определить угловое ускорение барабана, если считать барабан однородным круглым цилиндром. Массой неподвижного блока  пренебречь.
пренебречь.
Решение. Данная несвободная система состоит из груза и барабана , силы тяжести (активные силы) которых  и — заданные. Связью между грузом и барабаном является невесомая нить, которая не растягивается. Внешними связями по отношению к системе являются наклонная поверхность, а также подшипники
и — заданные. Связью между грузом и барабаном является невесомая нить, которая не растягивается. Внешними связями по отношению к системе являются наклонная поверхность, а также подшипники  и
и  .
.

Определим возможные перемещения системы. Для барабана возможным перемещением будет угол поворота  , для поступательного движения груза возможное перемещение
, для поступательного движения груза возможное перемещение  . Установим зависимость между величинами и
. Установим зависимость между величинами и  .
.
При перемещении груза вниз на величину  , нить сматывается с барабана на ту же самую величину
, нить сматывается с барабана на ту же самую величину  , а барабан повернется на угол . То есть
, а барабан повернется на угол . То есть

Приложим к несвободной механической системе силы инерции. Если груз опускается с ускорением  , направленным вниз по наклонной поверхности, то сила инерции груза
, направленным вниз по наклонной поверхности, то сила инерции груза  направлена в противоположную сторону. Момент сил инерции
направлена в противоположную сторону. Момент сил инерции  барабана направлен так, как показано на рисунке 14.1, в сторону, противоположную угловому ускорению
барабана направлен так, как показано на рисунке 14.1, в сторону, противоположную угловому ускорению  .
.
Составим общее уравнение динамики системы в форме (14.3)

где

Тогда:

Реакции  и
и  работы на элементарном перемещении не выполняют.
работы на элементарном перемещении не выполняют.
Уравнение (1) с учетом направлений сил и возможных перемещений запишем в виде:

или

Определим величины  и
и  , выражая при этом линейное ускорение груза через угловое ускорение барабана:
, выражая при этом линейное ускорение груза через угловое ускорение барабана:

где  — момент инерции барабана относительно оси
— момент инерции барабана относительно оси  ;
;
— угловое ускорение барабана.
Подставляя эти данные в уравнение (2), получим:

Поскольку  , то будем иметь:
, то будем иметь:

Откуда определяем угловое ускорение барабана:

Ответ:
Задача № 2
Два зубчатых колеса 1 и 2 с радиусами  и
и  находятся во внешнем зацеплении. Моменты инерции колес относительно их осей вращения равны соответственно
находятся во внешнем зацеплении. Моменты инерции колес относительно их осей вращения равны соответственно  и
и  .
.
Определить угловое ускорение колеса 1, если к нему приложен вращательный момент  . Силами сопротивления пренебречь (рис.14.2).
. Силами сопротивления пренебречь (рис.14.2).

Решение. Данная механическая система состоит из двух зубчатых колес 1 и 2, которые вращаются вокруг осей и . Пара зубчатых колес является системой с одной степенью свободы, поскольку угол поворота одного из колес определяет положение второго колеса. Активными силами являются силы тяжести  и
и  , вращательный момент
, вращательный момент
Предоставим возможное угловое перемещение  колесу 1, тогда колесо 2 осуществит возможно перемещение
колесу 1, тогда колесо 2 осуществит возможно перемещение  .
.
Зависимость между  и
и  может быть получена с помощью возможного перемещения
может быть получена с помощью возможного перемещения  точки
точки  касания колес. Поскольку точка принадлежит обоим зубчатым колесам, то
касания колес. Поскольку точка принадлежит обоим зубчатым колесам, то

откуда

Знак минус показывает, что возможные перемещения и направлены в разные стороны.
Определим силы инерции частей механической системы. При вращении колес вокруг неподвижных осей их силы инерции приводятся к парам сил, моменты которых противоположны по знаку угловым ускорением и равны по модулю произведениям моментов инерции относительно осей вращения на модули соответствующих угловых ускорений.
Угловые ускорения связаны соотношением, которое вытекает из равенства тангенциальных ускорений в месте соприкасания колес 1 и 2:
 или
или 
(минус введен потому, что колеса вращаются в разные стороны).
Момент пары сил инерции колеса 1 равен:

Момент пары сил инерции колеса 2:

С учетом зависимости (2) получим 
Для составления общего уравнения динамики необходимо подсчитать сумму работ активных сил и сил инерции на возможных перемещениях точек системы и приравнять эту сумму к нулю:

Работа сил тяжести и равна нулю, поскольку точки приложения этих сил неподвижны.
Воспользовавшись формулами (1), (3) и (4), после сокращения на , получим:

Отсюда определим искомое угловое ускорение зубчатого колеса 1:

Ответ: 
Задача № 3
На треугольной призме, боковые грани которой создают с горизонтом углы и  , размещены два груза и , которые весят
, размещены два груза и , которые весят  и
и  , соответственно. Они связаны между собой невесомой нитью, которая не растягивается и перекинута через блок (рис.14.3). Коэффициент трения скольжения равен
, соответственно. Они связаны между собой невесомой нитью, которая не растягивается и перекинута через блок (рис.14.3). Коэффициент трения скольжения равен  .
.
Определить ускорение грузов и натяжение нити. Массой блока пренебречь.
Решение. Данная механическая система состоит из двух грузов, которые движутся поступательно. Нить, масса которой не учитывается, является связью. Система имеет одну степень свободы.
Допустим, что груз движется вниз с ускорением , а груз вверх, причем ускорение груза равно ускорению груза , поскольку нить не растягивается. Покажем заданные силы – силы тяжести  и
и  , нормальные реакции боковых граней призмы
, нормальные реакции боковых граней призмы  и
и  и силы трения
и силы трения  и
и  (рис.14.3).
(рис.14.3).
Модули сил трения равны:


где

Поэтому

Силы трения направлены в стороны, противоположные направлениям движения грузов.
Поскольку грузы движутся поступательно, то равнодействующие сил инерции приложены в центрах масс тел, а их модули равны:

Приложим к грузам условно силы инерции  и
и  , направив их противоположно ускорению .
, направив их противоположно ускорению .
Предоставим мысленно системе возможное поступательное перемещение  , например, в сторону движения грузов. Составим общее уравнение динамики, в которое не войдут нормальные реакции граней призмы и , направления которых перпендикулярны возможным перемещениям грузов:
, например, в сторону движения грузов. Составим общее уравнение динамики, в которое не войдут нормальные реакции граней призмы и , направления которых перпендикулярны возможным перемещениям грузов:

где

Тогда уравнение (1) примет вид:

После сокращения на  получим:
получим:

Из последнего уравнения находим ускорение  :
:

Если

то грузы движутся в принятом направлении.
Для определения натяжения  нити, разрежем ее возле груза , тогда сила станет внешней. Далее применим принцип Даламбера в проекции на ось
нити, разрежем ее возле груза , тогда сила станет внешней. Далее применим принцип Даламбера в проекции на ось  (рис.14.4):
(рис.14.4):

откуда


Подставив в уравнение (4) значение из уравнения (2), после преобразований получим:

Окончательно,

Ответ: 
Задача № 4
Механическая система (рис.14.5) состоит из обмотанных нерастяжимой и невесомой нитью блока 1 с радиусом  и ступенчатого шкива 2 (радиусы ступеней
и ступенчатого шкива 2 (радиусы ступеней 
 радиус инерции относительно оси вращения
радиус инерции относительно оси вращения  вес шкива
вес шкива  ), а также из грузов 3 (весом
), а также из грузов 3 (весом  ) и 4 (весом
) и 4 (весом  ), которые прикреплены к этой нити.
), которые прикреплены к этой нити.

Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом  приложенным к блоку 1, вес которого принимается равным нулю.
приложенным к блоку 1, вес которого принимается равным нулю.
Определить ускорение  груза 3, пренебрегая трением.
груза 3, пренебрегая трением.
Решение. Рассматривается движение механической системы с одной степенью свободы . Связи, наложенные на систему — идеальны.
Для определения ускорения тела 3, применим общее уравнение динамики (14.3):

где  — сумма элементарных работ активных сил,
— сумма элементарных работ активных сил,
 — сумма элементарных работ сил инерции.
— сумма элементарных работ сил инерции.
Изобразим на рисунке 14.5 активные силы  — силы тяжести, и пару сил с моментом
— силы тяжести, и пару сил с моментом  , которые действуют на тела механической системы. Задаемся направлением ускорения
, которые действуют на тела механической системы. Задаемся направлением ускорения  тела 3, определяем направление ускорения
тела 3, определяем направление ускорения  ступенчатого шкива 2 и ускорение
ступенчатого шкива 2 и ускорение  груза 4.
груза 4.
Направление сил инерции  , и пары сил инерции с моментом
, и пары сил инерции с моментом  изображены на рис.14.5.
изображены на рис.14.5.
Определяем величины и  :
:

где  — момент инерции шкива 2.
— момент инерции шкива 2.
Предоставим шкиву 2 возможное перемещение  , с которым связаны возможные перемещения других тел системы и составим уравнение (1):
, с которым связаны возможные перемещения других тел системы и составим уравнение (1):

Выразим все возможные перемещения через :

Подставим значения (2) и (4) в уравнение (3)

Величины  и
и  , которые входят в последнее уравнение, выразим через искомую величину
, которые входят в последнее уравнение, выразим через искомую величину  :
:

Тогда:

Поскольку  ,то
,то

Решаем последнее уравнение относительно :

С учетом числовых значений получим:

Знак „минус” показывает на то, что ускорение груза 3 и ускорение других тел направлены противоположно показанным на рис.14.5.
Ответ: 
Задача № 5
Механическая система, состоящая из двух грузов и весом  и
и  , связанных нерастяжимой абсолютно гибкой нитью, а также однородного диска весом
, связанных нерастяжимой абсолютно гибкой нитью, а также однородного диска весом  и радиусом
и радиусом  (рис. 14.6), находится в движении (груз движется вниз).
(рис. 14.6), находится в движении (груз движется вниз).

Определить величину приложенного к диску тормозящего момента  , необходимого для того, чтобы остановить систему в течение заданного времени
, необходимого для того, чтобы остановить систему в течение заданного времени  , если в момент начала торможения (при
, если в момент начала торможения (при  ) скорость груза была
) скорость груза была  .
.
При решении задачи учесть силу трения  между грузом и столом, если коэффициент трения равен .
между грузом и столом, если коэффициент трения равен .
Решение. Наложенная на груз связь не идеальна, но общим уравнением динамики воспользоваться можно, если активных сил. Грузы , и диск осуществляют равномерно замедленное движение с заданными ускорениями

Изображаем действующие на систему активные силы , и  , а также силы инерции
, а также силы инерции  и
и  грузов и , и момент сил инерции
грузов и , и момент сил инерции  диска . В рассматриваемом случае имеем:
диска . В рассматриваемом случае имеем:

где

Данная система сил имеет одну степень свободы, обусловленную углом поворота  диска . Тогда возможные перемещения системы будут
диска . Тогда возможные перемещения системы будут
 и
и 
где  и
и  отсчитываются вдоль траектории грузов и .
отсчитываются вдоль траектории грузов и .
Составляя общее уравнение динамики (14.4), получим:

Подставим в это уравнение значения 

Поскольку  , то нулю равно выражение в квадратных скобках.
, то нулю равно выражение в квадратных скобках.
Тогда

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Цель занятия:
— отработка
практических навыков решения задач на
общее уравнение динамики материальных
систем.
Вопросы для
подготовки:
-
Принципы механики,
используемые при выводе общего уравнения
механики. -
Принцип Даламбера
– Лагранжа. -
Общее уравнение
динамики.
Методические
рекомендации к решению задач по теме
«Общее уравнение динамики ».
1)
изобразить на чертеже все активные силы
и силы трения, если они действуют;
2)
к активным силам добавить силы инерции
и моменты сил инерции, направив их
противоположно линейным или угловым
ускорениям;
3).
сообщить системе столько независимых
между собой возможных перемещений,
сколько степеней свободы имеет система;
4) выразить все
линейные и угловые ускорения через
ускорение того тела, движение которому
мы задаем;
5)
выразить все линейные и угловые возможные
перемещения через возможные перемещения
того тела, движение которому мы задаем;
6)
записать общее уравнение динамики и
определить искомые величины.
Пример
выполнения задания Д 19.
Тема: Применение общего уравнения
динамики к исследованию движения
механической системы».
Механическая
система под действием силы тяжести
приходит в движение из состояния покоя,
необходимо определить ускорения всех
тел, входящих в систему. Массами нитей
пренебречь. Трение качения и силы
сопротивления в подшипниках не учитывать.
Каток 3 – однородный цилиндр. Схема
механической системы показана на рисунке
9.
Дано:
![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;![]() ;f=0,1.
;f=0,1.

Рис.9
Решение:
Покажем
на механической системе веса тел
![]() ,
,![]() ,
,![]() ;
;
ускорения груза 1![]() и центра цилиндра 3
и центра цилиндра 3![]() ;
;
углы поворотов тел, совершающих
вращательное движение![]() ,
,![]() ;
;
угловые ускорения![]() ,
,![]() ;
;
силу трения груза 1![]() ;
;
силы инерции![]() ,
,![]() ;
;
моменты сил инерции![]() ,
,![]() ,
,
как указано на рисунке 9.
Используем общее уравнение динамики:
Если
механическая система, на которую наложены
голономные, стационарные, идеальные
связи, движется с ускорением, то, добавляя
к действующей на неё активным силам и
моментам этих сил, фиктивные силы инерции
и моменты сил инерции, получим формально
уравновешенную систему сил, к которой
можно применить принцип возможных
перемещений.
![]() ; (1)
; (1)
![]() , (2)
, (2)
где
![]() — внешние силы, действующие на систему;
— внешние силы, действующие на систему;
![]() —
—
силы инерции, действующие на систему;
![]() —
—
возможное перемещение.
Запишем все
уравнения связей для механической
системы:
 ; (3)
; (3)
где:
ε2,
![]() — угловое ускорение катка 3;
— угловое ускорение катка 3;
a1,
ac3
— линейные
ускорения груза 1 и центра однородного
катка 3.
Так
как система приходит в движение из
состояния покоя, направления ускорения
тел соответствуют направлениям движения
тел.
Покажем все заданные
силы и приложим силы и моменты инерции.
Сила инерции груза 1, движущегося
поступательно равна:
![]() . (4)
. (4)
Сила
инерции центра однородного цилиндра,
центр которого движется поступательно,
равна:
![]() ; (5)
; (5)
Используя
уравнение связи , определим момент сил
инерции блока 2, совершающего вращательное
движение:
![]() . (6)
. (6)
Используя
(3) и (6), определим момент сил инерции
однородного цилиндра 3, совершающего
вращательное движение:
![]() . (7)
. (7)
Сообщив
механической системе возможное
перемещение
![]() и возможный угол поворота
и возможный угол поворота![]() ,
,
составим общее уравнение динамики.
Так как
![]() ; (8)
; (8)
![]() , (9)
, (9)
то общее уравнение
динамики примет вид:
![]()
![]() (11)
(11)
Учитывая
уравнения (3) и исходные данные, полученные
из условия задачи, получим:
![]() ;(12)
;(12)
Разделим
каждое составляющее выражения на
![]() ,
,![]() и выразим ускорение груза 1
и выразим ускорение груза 1![]() :
:
![]() .
.
Для
нахождения ускорений остальных тел
воспользуемся уравнениями связи:
![]() ;
;
![]() ;
;
![]() .
.
Результаты
расчётов по данному методу представим
в виде таблицы.
|
|
|
|
|
|
|
|
|
|
ВОПРОСЫ ДЛЯ
САМОКОНТРОЛЯ
-
Что такое число
степеней свободы? -
Какие принципы
используются при получении общего
уравнения динамики? -
Как
записывается общее уравнение динамики
для системы, подчиненной голономным,
стационарным, удерживающим и идеальным
связям? -
Как
определить работу, совершаемую силами
инерции при различных видах движения
твердого тела?
САМОСТОЯТЕЛЬНАЯ
РАБОТА
Практические
занятия и самостоятельная работа
включает в себя решение задач: [9]
№№ 47.1; 47.3; 47.4;47.5;
47.6; 47.9; 47.11; 47.12; 47.15 47.21; 47.24.
Выдача расчетно-графической работы Д19
на тему «Применение общего уравнения
динамики к механической системе с одной
степенью свободы».[4]
Практическое
занятие 8
Тема:
Уравнения
Лагранжа II
рода
Цель занятия:
—
отработка практических навыков
составления дифференциальных уравнений
движения механической системы в
обобщенных координатах с помощью
уравнений Лагранжа второго рода.
Вопросы для
подготовки:
-
Обобщенные
координаты. -
Методы определения
обобщенных сил. -
Уравнения
Лагранжа II
рода. -
Функция Лагранжа.
-
Достоинства
уравнений Лагранжа II
рода.
Методические
рекомендации к решению задач по теме
«Уравнения Лагранжа второго рода ».
Уравнения
Лагранжа второго рода представляют
собой дифференциальные уравнения
движения механической системы в
обобщенных координатах. Для составления
уравнений необходимо:
1)
проанализировать состав рассматриваемой
механической системы, в которую могут
входить материальные точки и тела;
2)
определить силы, приложенные к точкам
и телам механической системы; выявить
среди них консервативные силы;
3) определить число
степеней свободы механической системы;
4)
выбрать обобщенные координаты, зная
координаты материальных точек и точек
приложения сил к телам, входящих в
систему;
5)
выразить координаты точек приложения
сил к телам и координаты материальных
точек системы через координаты
обобщенные;
6) определить
обобщенные скорости;
7)
определить кинетическую энергию
механической системы с учетом выбранных
обобщенных координат и скоростей;

определить частные производные от
кинетической энергии по обобщенным
координатам;
9)
определить частные производные от
кинетической энергии по обобщенным
скоростям;
10)
определить производные по времени от
частных производных от кинетической
энергии по обобщенным скоростям;
11)
определить обобщенные силы как
коэффициенты перед вариациями обобщенных
координат в выражении для виртуальной
работы;
12)
составить уравнения Лагранжа второго
рода и определить искомые величины.
Пример
решения задач по теме:
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
iSopromat.ru

Рассмотрим общее уравнение динамики механической системы, которое также называется принципом Даламбера-Лагранжа:
Объединяя этот принцип с принципом возможных перемещений для систем с идеальными связями получаем уравнение:
которое называют общим уравнением динамики (или принципом Даламбера-Лагранжа).
При движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и сил инерции на любом возможном перемещении системы будет равна нолю.
Поскольку в уравнении присутствуют силы инерции, а следовательно и ускорения, то эти уравнения представляют собой дифференциальные уравнения движения механической системы с идеальными связями.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Общее уравнение динамики. Пример решения задачи
Условие задачи
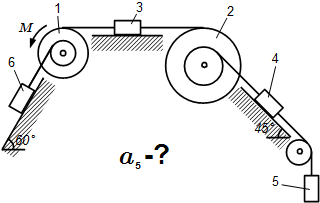
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом M = 10 Н·м , приложенной к шкиву 1. Радиусы ступеней шкива 1 равны: R 1 = 0,2 м , r 1 = 0,1 м , а шкива 2 – R 2 = 0,3 м , r 2 = 0,15 м ; их радиусы инерции относительно осей вращения равны соответственно ρ 1 = 0,1 м и ρ 2 = 0,2 м .
Пренебрегая трением, определить ускорение груза 5. Веса шкивов и грузов заданы: P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н . Грузы, веса которых равны нулю, на чертеже не изображать.
Указание. При решении задачи использовать общее уравнение динамики (принцип Даламбера – Лагранжа).
Решение задачи
Дано: R 1 = 0,2 м , r 1 = 0,1 м , R 2 = 0,3 м , r 2 = 0,15 м , ρ 1 = 0,1 м , ρ 2 = 0,2 м . P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н , M = 10 Н·м .
Установление кинематических соотношений
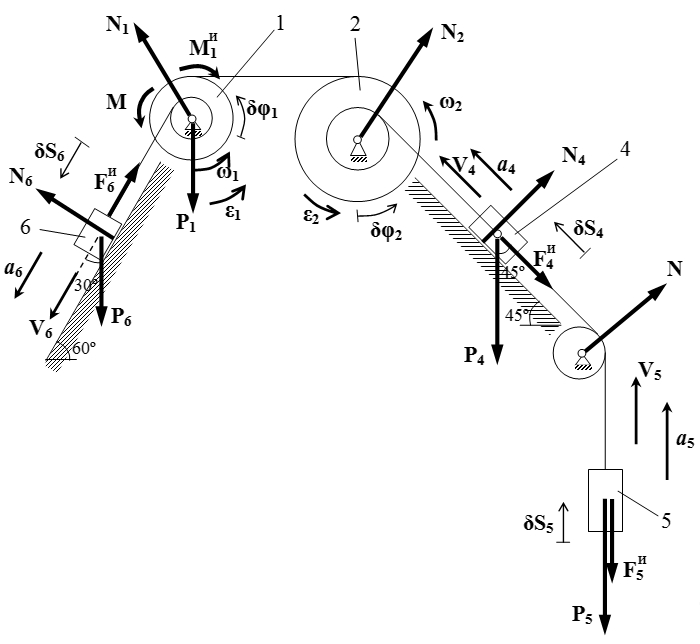
Установим кинематические соотношения. Пусть V 4 , V 5 , V 6 , a 4 , a 5 , a 6 , δS 4 , δS 5 , δS 6 – скорости, ускорения и малые перемещения грузов 4,5 и 6. Пусть ω 1 , ω 2 , ε 1 , ε 2 , δφ 1 , δφ 2 – угловые скорости, угловые ускорения и малые углы поворота шкивов 1 и 2.
Скорость движения нити между телами 2, 4 и 5:
. Отсюда .
Скорость движения нити между шкивами 1 и 2:
. Отсюда
.
Скорость движения нити между телами 1 и 6:
.
Итак, мы нашли связь между скоростями тел.
;
;
.
Поскольку ускорения – это производные скоростей по времени, ,
то дифференцируя по времени предыдущие формулы, находим связь между ускорениями:
;
;
.
Поскольку скорости – это производные от перемещений по времени, то такая же связь есть между бесконечно малыми перемещениями.
;
;
.
Активные внешние силы
Рассмотрим внешние силы, действующие на систему.
Это силы тяжести тел P 1 = 40 Н , P 4 = 20 Н , P 5 = 30 Н и P 6 = 10 Н , направленные вниз;
заданная пара сил с моментом M = 10 Н·м ;
силы давления осей N 1 , N 2 и N шкивов 1, 2 и невесомого блока;
силы реакции N 4 и N 6 , действующие на грузы со стороны поверхностей, перпендикулярные этим поверхностям.
Силы инерции
Мы будем решать эту задачу с помощью общего уравнения динамики, применяя принцип Даламбера — Лагранжа. Он заключается в том, что сначала мы вводим силы инерции. После введения сил инерции, задача динамики превращается в задачу статики. То есть нам нужно найти неизвестные силы инерции, чтобы система находилась в равновесии. Данную задачу статики мы решаем, применяя принцип Даламбера. То есть считаем, что система совершила малое перемещение. Тогда в равновесии, сумма работ всех сил, при таком перемещении, равна нулю.
Итак, на первом этапе мы вводим силы инерции. Для этого предполагаем, что система движется с некоторым, пока не определенным, ускорением. То есть шкивы 1 и 2 вращаются с угловыми ускорениями ε 1 и ε 2 , соответственно; грузы 4,5 и 6 совершают поступательное движение с ускорениями a 4 , a 5 и a 6 , соответственно. Между этими ускорениями имеются связи, которые мы нашли ранее. То есть все эти ускорения можно выразить через одно ускорение a 5 . Силы инерции определяются так, что они равны по модулю и противоположны по направлению тем силам (и моментам сил), которые, по законам динамики, создавали бы предполагаемые ускорения (при отсутствии других сил).
Определяем модули (абсолютные значения) сил и моментов инерции и выражаем их через a 5 .
Пусть – массы тел;
– момент инерции шкива 1.
Момент сил инерции, действующий на шкив 1:
.
Силы инерции, действующие на грузы 4, 5 и 6:
;
;
.
Изображаем силы инерции на чертеже учитывая, что их направления противоположны ускорениям.
Применение общего уравнения динамики
Даем системе бесконечно малое перемещение. Пусть груз 5 переместился на малое расстояние δS 5 . Тогда угол поворота δφ 1 шкива 1 и перемещения δS 4 и δS 6 грузов 4 и 6 определяются с помощью установленных ранее кинематических соотношений. Поскольку нити нерастяжимые, то они не совершают работу при таком перемещении. Это означает, что система имеет идеальные связи. Поэтому мы можем применить общее уравнение динамики:
,
согласно которому сумма работ всех активных сил и сил инерции, при таком перемещении, равна нулю.
Определение суммы работ внешних активных сил и сил инерции
Работа, которую совершает сила при перемещении точки ее приложения на малое смещение равна скалярному произведению векторов , то есть произведению модулей векторов F и ds на косинус угла между ними.
Работа, произведенная моментом сил , вычисляется аналогично:
.
Определяем работы всех активных сил и сил инерции. Поскольку центры осей шкивов 1, 2 и невесомого блока не совершают перемещений, то силы P 1 , N 1 , N 2 и N не совершают работу. Поскольку силы N 4 и N 6 перпендикулярны перемещениям грузов 4 и 6, то эти силы также не совершают работу.
Находим сумму работ остальных активных сил и сил инерции.
.
Подставляем выражения для сил инерции и применяем кинематические соотношения.
.
Сокращаем на δS 5 и преобразовываем.
.
Подставляем численные значения.
;
;
м/с 2 .
Автор: Олег Одинцов . Опубликовано: 02-08-2015
Общее уравнение динамики


Общее уравнение динамики
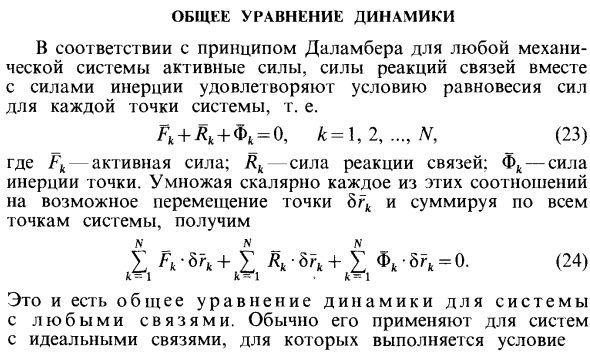
- Соответствует балансу сил в каждой точке системы в соответствии с принципом Дарренва: механическая система, активная сила, объединенная сила реакции и сила инерции. Fk + Lk + Fk = 0, k = 1, 2, …, N, (23) Где Гк — активная сила. Rk — сила реакции связи; Фк — сила инерции точки. Умножение каждого из этих соотношений на возможное смещение точки 8rk на скаляр и суммирование всех точек в системе дает: ДFk ^ k + ДFk-8rk + ДФк • 8гк = 0. (24) Это общее уравнение динамики связанных систем. Обычно используется для систем с полной связью. * 5? * = 0- В этом случае (24) принимает одну из следующих форм (W) • «.» 0; (Ft-mta *) • 8rt = 0; D (^ — Людмила Фирмаль
В случае равновесия системы, если все силы инерции системы указывают на ноль, мы переходим к принципу статического возможного смещения без доказательства достаточности равновесия системы. Уравнениям общей динамики могут быть даны другие эквивалентные формы. Выявление скалярного произведения векторов можно выразить как: £ + ® „) Sy + (A, + Φ,.) 6 -.] — 0. Где xk, yk, zk — координаты k-й точки в системе. Учтите, что проекция сил инерции на оси координат за счет проекции ускорения на эти оси выражается следующей зависимостью: F * x =
тках = -тхх; Fku = -tkaku = -tkuk, F4; = -tkakg = -mkzk, общее уравнение для динамики дано в виде £ [(Ffc, -mjkxJk) 8xlk + (fi, -Wl | kA) 8 No. + (Fte-m) tfJk) 8zjk] = 0. (25 ‘).
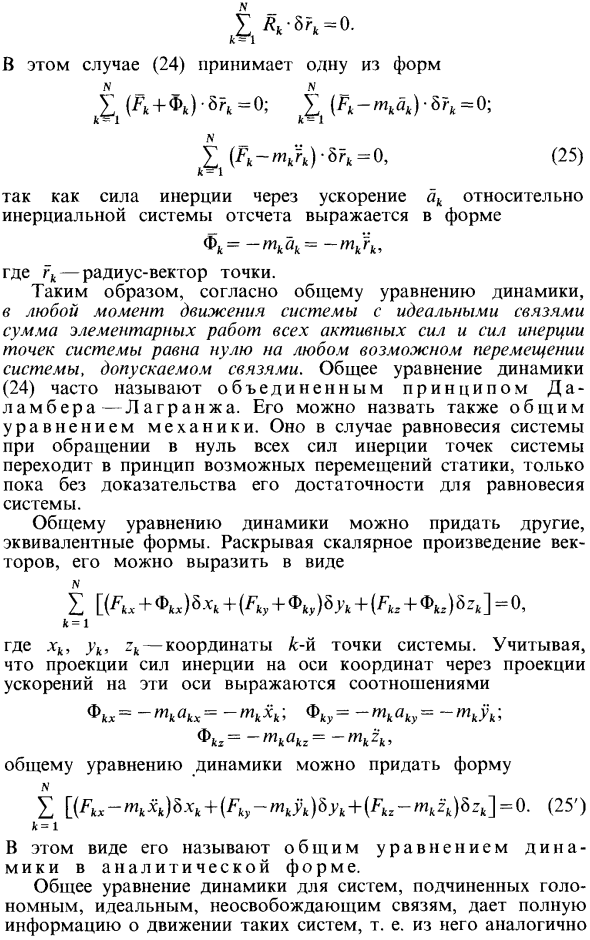
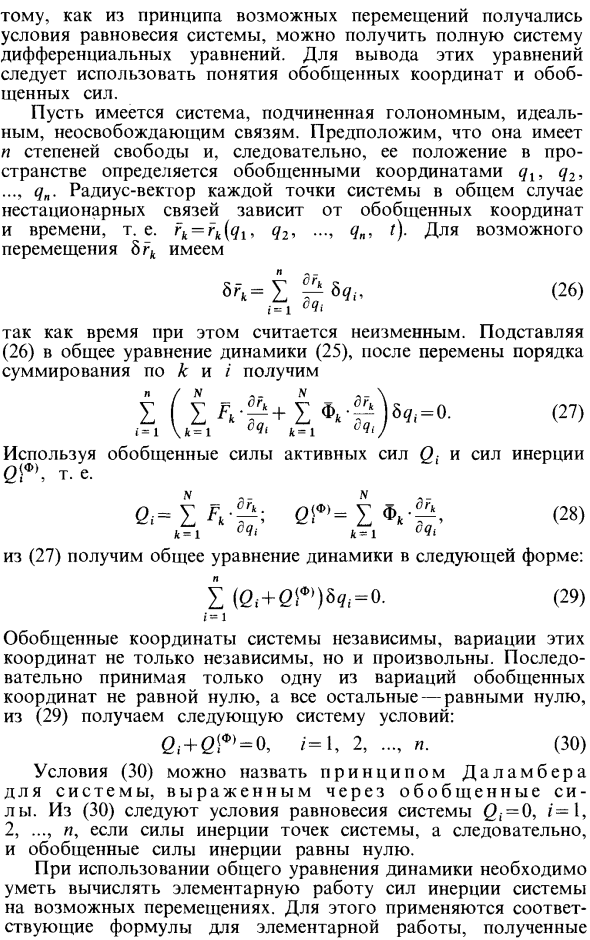
В таком виде оно называется общим уравнением динамики в аналитическом виде. Общие уравнения для динамики систем, подверженных голономным и идеальным неразрывным связям, дают полную информацию о поведении таких систем. Это похоже на это. Вы можете получить полную систему дифференциальных уравнений о том, как равновесное состояние системы получается из принципа возможного смещения. Вывод этих уравнений требует использования обобщенных координат и обобщенных концепций сил. Предположим, у вас есть система, которая зависит от голономного, идеального, неизданного соединения.
Предположим, что положение в пространстве определяется обобщенными координатами qt, q2, …. q „, поскольку степень свободы равна n. Радиус-вектор каждой точки системы в общем случае нестационарных соотношений равен Обобщенные координаты и время, т. Е. ^ = M * (? 1, qz, nn, 0. (26) Потому что время считается неизменным. После подстановки (26) в общее динамическое уравнение (25) и изменения порядка сумм k и i получается следующее. к. (27) Используйте активную силу O, обобщенную силу O и силу инерции 21F ‘. (28) 4 = 1 * ‘? * = 1 001 Из (27) получите общее динамическое уравнение в следующем формате: Z (e (+ e> φ,) 8 ?. = ° — (29) Обобщенные координаты системы независимы. Эти изменения координат не только независимы, но и необязательны.
Предполагая, что только одна из обобщенных вариаций координат не равна нулю, а все остальные равны нулю, (29) дает следующую условную систему: 0 (+0! Φ) = 0, r = 1, 2, … и т. Д. (30) Условие (30) называется принципом Даламбера системы и выражается обобщенной силой. Условие уравнения для системы b следует (30), = 0, α = 1, 2, …, n, если сила инерции точки системы и, следовательно, обобщенная сила инерции, равна нулю. При использовании общих динамических уравнений необходимо уметь рассчитывать основную работу сил инерции системы при возможных смещениях. Для этого используется формула, соответствующая полученной работе начальной школы Для нормальной мощности.
- Рассмотрим приложение к силе инерции твердого тела для определенного движения. Поступательное движение. В этом случае тело имеет три степени свободы и принудительно соединено, поэтому может выполняться только поступательное движение. Движение тела, которое обеспечивает связь, также является поступательным движением. Инерционная сила при переносе уменьшается до результирующего Ф * = -Мас = -Ма. Для суммы основной работы силы инерции на возможность поступательного движения тела, ггйгй = = Φ * 8 8s = * * -8r = -L / d-8g, Где 8gs = 8g — возможное смещение центра тяжести и любой точки тела, потому что переводимое смещение одинаково во всех точках тела. Ускорение такое же, то есть как есть. Когда тело вращается вокруг фиксированной оси. Тело в этом случае имеет одну степень свободы.
Он может вращаться вокруг неподвижной оси Oz. Возможные перемещения, которые возможны благодаря наложенному соединению, такие же, как и вращение тела на базовый угол 8 (когда центр тяжести выбран в качестве центра торможения). Сумма основных сил инерции возможных инерционных перемещений на плоскости является основной работой главного вектора сил инерции = -массовая работа возможного движения центра масс и основной относительно оси Cz через центр масс Основной момент инерции общего вращательного движения сводится к работе элемента.
Следовательно, в этом случае ось ротора будет оставаться направленной на одну и ту же звезду и для наблюдателя, находящегося на Земле, она будет следовать за звездой в ее суточном движении. Людмила Фирмаль
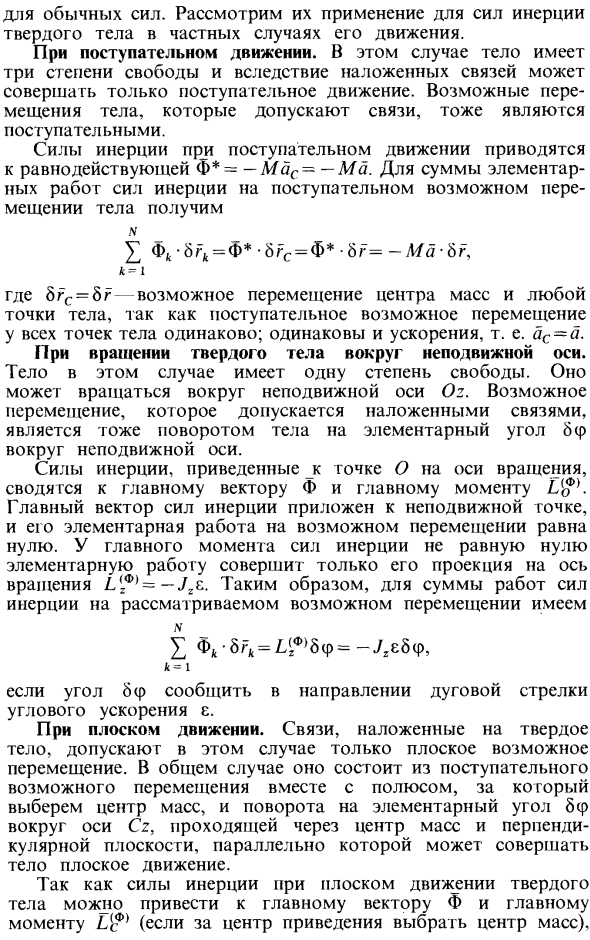
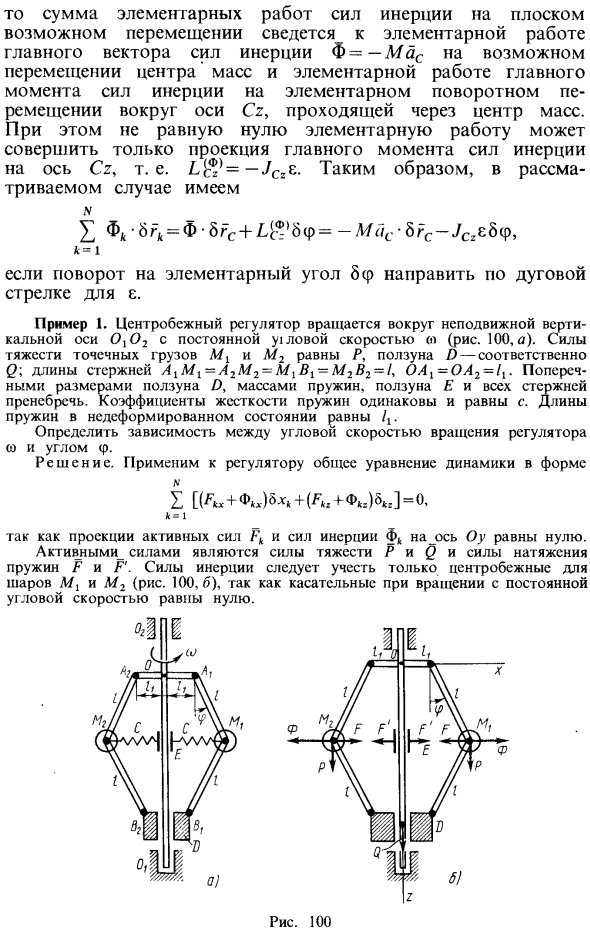
В этом случае ненулевую базовую работу можно выполнить, только проецируя главный момент инерции на ось Cz, т.е. L $, = -JCze. Так что в рассматриваемом случае, ZФ * ’8г * = Ф-5гс + 1, . 8 , При повороте на базовый угол 8 ; z2 = 2Zcos «p. Изменяя эти зависимости, есть: 8.V] = Zcos ; Sz2 = -Zsin ; 8z2 = -2Zsin , оно становится следующим. — (Z1 + Zsinq>) «e2Z cosip-Z’sinip -cZsinipcosip -gsin 3-PTg -Qtg = официальный 1 приложение Система, предполагая, что координата FL-z постоянна, нам нужно вычислить инерцию смещения точки_ при изменении координаты x.
Поскольку мы дали 6x возможных движений в направлении увеличения координаты x, уравнение (b) 0! = O, сила тяжести Pt, P2 перпендикулярна возможному движению, сила упругости (одна добавляется к нагрузке, другая изначально равна, но направление противоположно), к призме точки крепления пружины ) В сумме приведем базовую работу, равную нулю с константой s. Для каждой обобщенной силы инерции -F18l-Ф2.8й. P, x + P2 (от cosa + x) Q * ‘= — = — (Ф 、 + Ф2 、) = —————!
= 8 раз Призма инерции Доска У нас есть @ P2sina83 — F6s Суммированная река Сена По возрастающей координате z всегда вычисляется по формуле.
Если s рассчитывается из положения статического равновесия нагрузки B, поскольку сила упругости F = cX = c (XCI + 3), HS — статическое растяжение пружины под действием силы тяжести. Равновесие. В положении Статика удовлетворяет условию Равновесие. Обобщенные Инерция у нас есть интеграция (A) Получите следующее Константа С, Synaf + cj, условия Со второй интеграцией x = -L ^^ lcoskt + Cjt + Cf — (S-h-xcosa), г Где Ф2 — проекция инерции нагрузки B на ось.
Подставьте полученное значение обобщенной системы нагнетания для дифференциального уравнения. Исключите следующее выражение для s из второго выражения: P2 [P | + P2 (1-интеграция (r), получить s


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://1cov-edu.ru/mehanika/dinamika-tel/obschee-uravnenie-dinamiki-primer-resheniya-zadachi/
http://lfirmal.com/obshchee-uravnenie-dinamiki/
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
Первая часть: «Введение в теорию автоматического управления. Основные понятия теории управления техническим системами»
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

Рис. 2.1.1 – Схематическое представление САУ (звена)
При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:
 — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
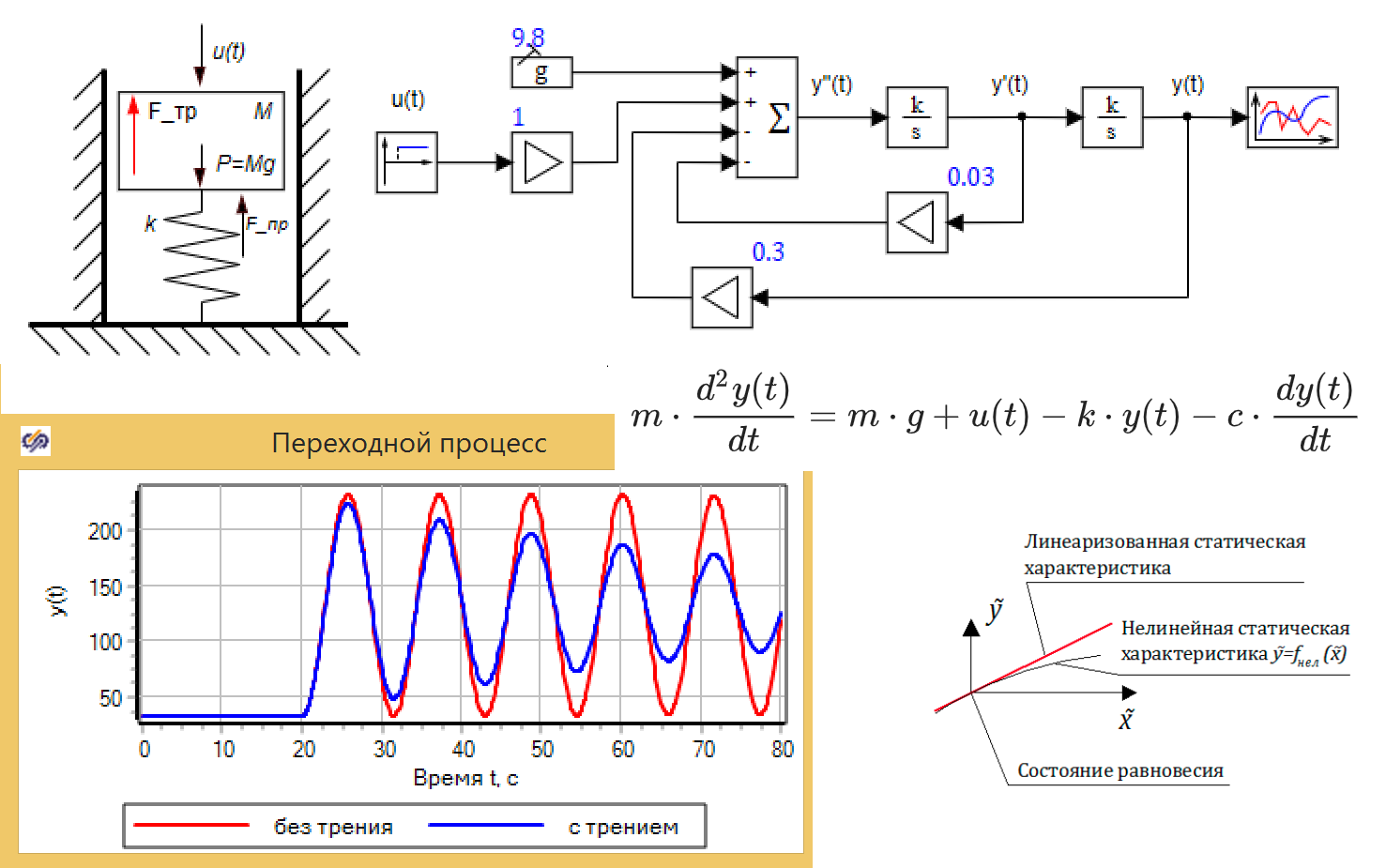
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Рис. 2.1.2 – Механический демпфер
Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):
![$m cdot g Rightarrow [frac{кг cdot м}{ с^2}]; c Rightarrow [frac{кг}{с}]; k Rightarrow [frac{кг}{с^2}]$](https://habrastorage.org/getpro/habr/formulas/2cd/5a6/e7c/2cd5a6e7ce7062e15d0f51e41d23e33d.svg)
Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0
![$left[ begin{gathered} y(t) =y_0 + Delta y(t); u(t) = u_0 + Delta u(t);\ y'(t) = [Delta y(t)]'; y''(t) =[Delta y(t)]''\ end{gathered} right.$](https://habrastorage.org/getpro/habr/formulas/a1a/21c/8be/a1a21c8bed05649e1f1e8ba7c9ef475d.svg) . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если
 , то уравнение принимает вид:
, то уравнение принимает вид:

или
![$y_0 = frac{1}{k} cdot[u_0+m cdot g] mathbf{(2.1.5)}$](https://habrastorage.org/getpro/habr/formulas/5bf/ef0/ad3/5bfef0ad367116a126b3c5945e96cf32.svg)
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Рис. 2.1.3 – Статическая характеристика механического демпфера
Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:

где:

Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:
![$T_1 = frac{c}{k} Rightarrow [frac{кг cdot c^2}{c cdot кг}] = [c]$](https://habrastorage.org/getpro/habr/formulas/a8b/121/5af/a8b1215af5be3832d8764d1e565e1a3e.svg)
![$T_2^2 = frac{m}{k} Rightarrow [frac{кг cdot c^2}{kg}] =[c^2]$](https://habrastorage.org/getpro/habr/formulas/bba/107/4cc/bba1074cce4ffb3f21723a69459b9a65.svg)
Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:
 — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор;

 — линейный дифференциальный оператор, вырожденный в константу, равную
— линейный дифференциальный оператор, вырожденный в константу, равную
.
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:
![$left[ begin{gathered} widetilde y(t) = frac {y(t)-y_0}{y_0} = frac {Delta y(t)}{y_0}\ widetilde u(t) = frac {u(t)-u_0}{u_0} =frac {Delta u(t)}{u_0}\ end{gathered} right. Rightarrow left[ begin{gathered} y(t) =y_0 cdot [1+ widetilde y(t)]\ u(t) = u_0 cdot [1+ widetilde u(t)]\ end{gathered} right. Rightarrow left[ begin{gathered} y'(t) =y_0 cdot widetilde y(t)'\ y''(t) = y_0 cdot widetilde y(t)''\ end{gathered} right. $](https://habrastorage.org/getpro/habr/formulas/25e/2ac/68e/25e2ac68e8c06385de62e373dfe9c584.svg)
Подставляя эти соотношения в уравнение (2.1.2), имеем:
![$m cdot y_0 cdot frac{d^2 widetilde y(t)}{dt^2} = m cdot g +u_0 cdot[1+widetilde u(t)] -k cdot y_0 cdot[1+widetilde y(t)] - c cdot y_0 cdot frac{d widetilde y(t)}{dt}; или$](https://habrastorage.org/getpro/habr/formulas/6d1/6ed/93d/6d16ed93d188129b2e09493814b96c78.svg)

Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие
 , и, разделив на
, и, разделив на
 , получаем:
, получаем:


где:
 — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 
![$left[frac{кг cdot м}{с^2} cdot frac{c^2}{кг} cdot frac{1}{м}right] =[1].$](https://habrastorage.org/getpro/habr/formulas/9db/980/d44/9db980d441cbe407a3fc2669fc5e1e85.svg)
Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:

Рис. 2.1.4 – Статические характеристики механического демпфера
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где
 дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 << 1, и поэтому уравнения динамики ядерного реактора, в принципе, могут быть линеаризованы.

Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:

Рис. 2.2.2 – Звено САР
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку ![$[y(t)-y_0] equiv Delta y(t); y'(t) = [y_0+Delta y(t)]' = (Delta y(t))'$](https://habrastorage.org/getpro/habr/formulas/111/372/429/111372429c47c943b8759fac56258c62.svg) , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:

где:

Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где
 – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора
выше порядка оператора
:

Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>
![$[a_0^*] = [1] ; [a_1^*]= [c]; [a_2^*]= [c^2]; [a_3^*]= [c^3];...[a_n^*]= [c^n]\ [b_0^*] = [1] ; [b_1^*]= [c]; [b_2^*]= [c^2]; [b_3^*]= [b^3];...[b_m^*]= [c^m]$](https://habrastorage.org/getpro/habr/formulas/40d/da9/fa3/40dda9fa3e51b85cc83f37160acc18b6.svg)
Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:
![$a_n cdot tilde{y}^{(n)} +a_{(n-1)}cdot tilde{y}^{(n-1)} +..+a_1cdot tilde{y}'+tilde{y} = \ =k cdot [b_m cdot tilde{u}^{(m)} +b_{(m-1)} cdot tilde{u}^{(m-1)} +..+b_1 cdot tilde{u}'+ tilde{u}] mathbf{(2.2.8)}$](https://habrastorage.org/getpro/habr/formulas/68f/b04/761/68fb04761fcce7e806022850201e0f3e.svg)
где:

или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:
![$a_3^0 cdot y'''(t) +a_2^0 cdot y''(t)+a_1^0 cdot y'(t) cdot[y(t)-d]+ a_2^0 cdot y^2(t)=b_1^0 cdot x'(t) +b_0^0 cdot x(t); $](https://habrastorage.org/getpro/habr/formulas/77a/9a7/5d4/77a9a75d4c2a1e1f6fff989fe5c54ada.svg)
Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:


Рис. 2.2.3 – Линеаризации статической характеристики
• во-вторых, слагаемое в левой части ![$a_1^0 cdot y'(t) cdot[y(t)-d]$](https://habrastorage.org/getpro/habr/formulas/2aa/092/6e2/2aa0926e275f01f2b580e84645aad9c7.svg) — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:
![$tilde{y}(t) = frac{y(t) - y_0}{y_0}; Rightarrow y(t) = y_0 cdot [1+ tilde{y}(t)]; \ tilde{x}(t) = frac{x(t) - x_0}{x_0}; Rightarrow x(t) = x_0 cdot [1+ tilde{x}(t)].$](https://habrastorage.org/getpro/habr/formulas/5a3/22b/b84/5a322bb84fd6f34b9d5caff525ce7366.svg)
Заметим, что:
 .
.
Подставляя значения x(t) и y(t) в исходное уравнение:
![$ a_3^0 cdot y_0 cdot tilde y'''(t) +a_2^0 cdot y_0 cdot tilde y''(t)+a_1^0 cdot y_0 cdot tilde y'(t) cdot[y_0+y_0 cdot tilde y(t) -d]+a_0^0 cdot y_0^2 cdot[1+ tilde y(t)]^2 = \ = b_1^0 cdot x_0 cdot tilde x'(t) + b_0^0 cdot х_0 cdot[1+tilde x(t)]; Rightarrow раскрыв скобки Rightarrow \ a_3^0 cdot y_0 cdot tilde y'''(t)+a_2^0 cdot y_0 cdot tilde y''(t)+a_1^0 cdot y_0^2 cdot tilde y'(t) + a_1^0 cdot y_0^2 cdot tilde y'(t) cdot tilde y(t)-a_1^0 cdot y_0 cdot tilde y'(t) cdot d + \ +a_0^0 cdot y_0^2 +2 cdot a_0^0 cdot y_0^2 cdottilde y(t) +a_0^0 cdot y_0^2 cdottilde y(t)^2 = b_1^0 cdot x_0 cdot tilde x'(t) + b_0^0 cdot х_0+ b_0^0 cdot х_0 cdot tilde x(t)];$](https://habrastorage.org/getpro/habr/formulas/903/74a/d6a/90374ad6a726a4015ef351df2954609f.svg)
Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:
![$a_3 cdot tilde y'''(t)+a_2 cdot tilde y''(t)+a_1 cdot tilde y'(t)+ tilde y(t) = k cdot[ b_1 cdot tilde x'(t) + tilde x(t)]$](https://habrastorage.org/getpro/habr/formulas/1ec/058/90c/1ec05890c11ec020b0d4e0de395b4b11.svg)
где:

Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.
Известно, что

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_{част.}(t) $inline$ — частное решение. $inline$
y_{част.}(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:
![$y_{собств.}(t)=sum_{j=1}^{n-2} C_j cdot e^{lambda_{j} cdot t} +C_{n-1} cdot e^{lambda_{n-1} cdot t}cdot [1+C_ncdot t]. mathbf{(2.3.7)}$](https://habrastorage.org/getpro/habr/formulas/bd4/cd7/74b/bd4cd774bc135533b8ae168814cd8f5d.svg)
Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:
![$y_{собств.}(t)=sum_{j=1}^{n-k} C_j cdot e^{lambda_{j} cdot t} +C_{n+1-k} cdot e^{lambda_{n+1-k} cdot t}cdot [1+C_{n+2-k}cdot t+C_{n+3-k}cdot t^2+.. \ ..+C_{n}cdot t^{k-1}]. mathbf{(2.3.8)}$](https://habrastorage.org/getpro/habr/formulas/843/0d6/830/8430d6830ab04e32ef738db54c429785.svg)
5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где
 — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).

Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).

Рис. 2.3.2 – Решение уравнения динамики
Ссылки по теме:
- Википедия про ряд Тейлора
- Дифференциальные уравнения на Match24.ru
- Пример создания модели груза на пружине.
- Начало лекций здесь: Введение в теорию автоматического управления. Основные понятия теории управления техническим системами.
- Следующая часть здесь: Математическое описание систем автоматического управления. ч. 2.2 — 2.8
Продолжениее: Математическое описание систем автоматического управления. 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
3.3. Апериодическое звено 1–го порядка (инерционное звено). На примере входной камеры ядерного реактора.
3.4. Апериодическое звено 2-го порядка.
3.5. Колебательное звено.
3.6. Инерционно-дифференцирующее звено.
3.7. Форсирующее звено.
3.8. Инерционно-интегрирующее (звено интегрирующее звено с замедлением).
3.9 Изодромное звено (изодром).